This document sets the guidelines for the Special Interest Group (SIG) dedicated to the development and maintenance of the UAVCAN Drone Application Layer (UDRAL). The rules set out in this post are derived from our experience managing a prior standard draft — DS-015 (now defunct) — with appropriate precautions taken to avoid repeating past mistakes.
Scope
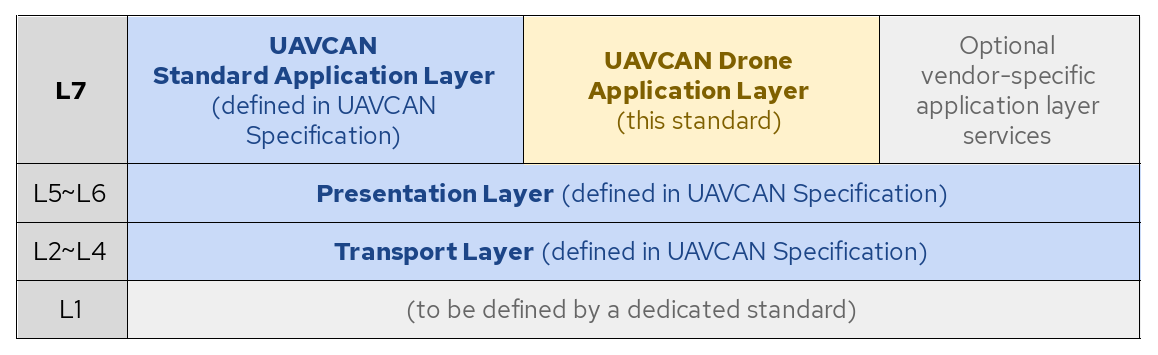
The UAVCAN v1.0 Specification does not standardize the application layer (L7 per the OSI model) except for certain basic, domain-agnostic utility functions such as firmware update or configuration management. Likewise, it does not define the physical layer (L1 per the OSI model), limiting its scope to approximately L2 through L6, inclusive. This is done to widen the applicability limits of the core protocol without putting undue constraints on practical implementations.
This SIG will develop, and then maintain for an indefinite period, an open and royalty-free standard that defines an application-layer protocol for use in avionic systems of autonomous aerial vehicles. Due to shared underlying principles and common concepts, the resulting standard may be applicable (perhaps to a limited extent) in other types of systems such as robotics and manned aviation, which is to be encouraged as long as such widening of the scope is not in contradiction with the main objective of the SIG.
The SIG will not attempt to define the entirety of the application layer, leaving the possibility for vendors and implementers to introduce additional capabilities and interfaces beside this standard as necessary.
This SIG will not engage in the development of the physical layer connectivity standard. A separate SIG will be organized for that purpose instead.
This SIG will not engage in the development or modification of the UAVCAN v1.0 standard itself, although it is welcome to bring proposals to the protocol maintainers if desired.
The scope is summarized on the following diagram:
The SIG will take the design recommendations provided in the official UAVCAN Guide into consideration.
The main work product of the SIG is a set of DSDL definitions published in the official public regulated data types repository along with enclosed technical documentation and design rationale.
Organization
The term “open”, as used in “open standard” above, denotes that the final standard is to be accessible to the general public under a permissive license on a royalty-free basis. Despite the final product being available to everyone free of charge, participation in its development process will be limited only to the members of the UAVCAN Consortium. This move is intended to reduce the workload on the contributors, eliminate random opinions from the conversation, and incentivize paid membership in the Consortium which helps us sustain the project. Observe that open-source projects and non-profits are entitled to free membership.
The discussion of the standard will be conducted chiefly in the closed category of this forum. The forum will also be used to facilitate voting (more on this later). The SIG can convene on regular or ad-hoc voice calls at its discretion, provided that active participation in the call is limited to the SIG participants only (others may be allowed to listen). However, key decisions and agreements reached using any means of communication other than this forum will be documented on the latter to ensure that the entire group has full access to the relevant information regardless of one’s ability to participate in voice conversations or any other off-forum communications.
The existing Drone SIG subcategory will be migrated into the closed section of the forum to accommodate the above.
The number of representatives that a UAVCAN Consortium member is allowed to bring into the conversation depends on its membership tier:
- Sponsored or Expert members: up to 5 representatives.
- Regular members: up to 2 representatives.
Representatives can be registered/unregistered by sending a private message to the forum admins.
Any active member of the Consortium can become a participant of this SIG by merely informing the admins. The admins may remove a Consortium member from the SIG in the event of its representatives being unreachable for a considerable amount of time in order to prevent such members from delaying the group’s progress. An up-to-date list of the current SIG participants will be maintained in a dedicated post on this forum for bookkeeping purposes.
Major technical questions and technical disagreements between the SIG participants will be resolved by voting. The voting process will be managed using the forum’s built-in capability.
Each participant of the SIG is allowed to cast up to 1 (one) vote (this implies that representatives should internally select one delegate who is to cast the vote for the represented SIG participant).
A Consortium member who is not a participant of the SIG may still cast a vote, which would automatically register it as a SIG participant.
Unless explicitly specified otherwise, each voting session will be open for 14 calendar days or until each current SIG member has cast its vote or expressly desisted from doing so (whichever happens first). A voting session is considered successful if at least 75% of the active SIG participants have either registered their votes or expressly desisted from doing so.
Besides the SIG participants, each of the two core developers of the protocol (@pavel.kirienko and @scottdixon) are allocated one vote each.