Hardware
During the construction of the L3X-Z hexapod we had to develop several OpenCyphal nodes. One was the leg controller which is already described in the L3X-Z thread. The second type of node is the auxiliary controller which controls the less important task like the state of the emergency switch or the warning lights.
At first this controller was only some Arduino on a bread board like this:
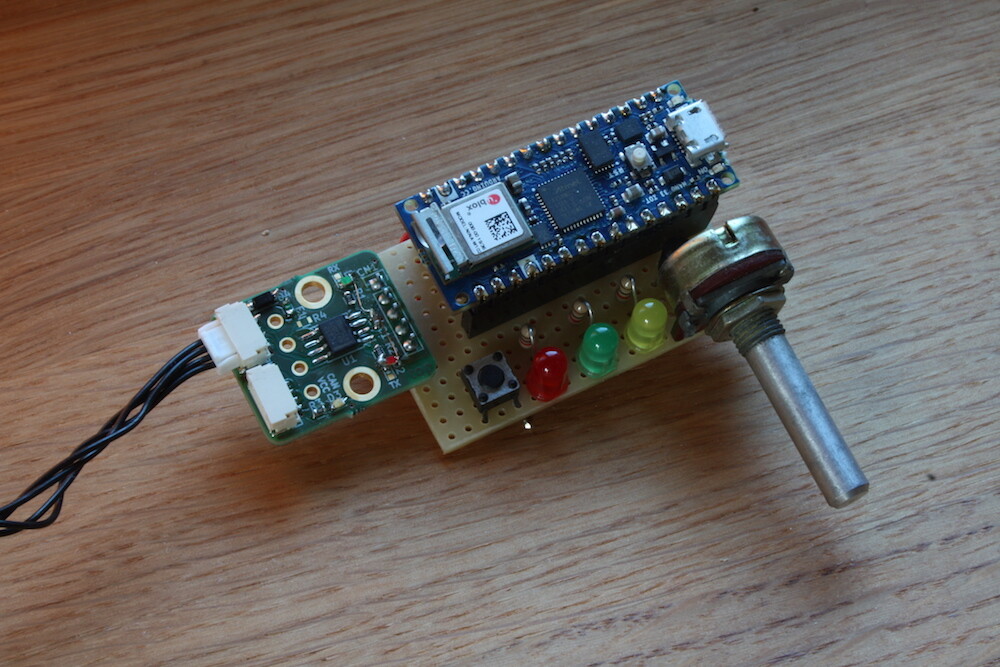
and that:

But now this has emerged into a own board: The OpenCyphalPicoBase
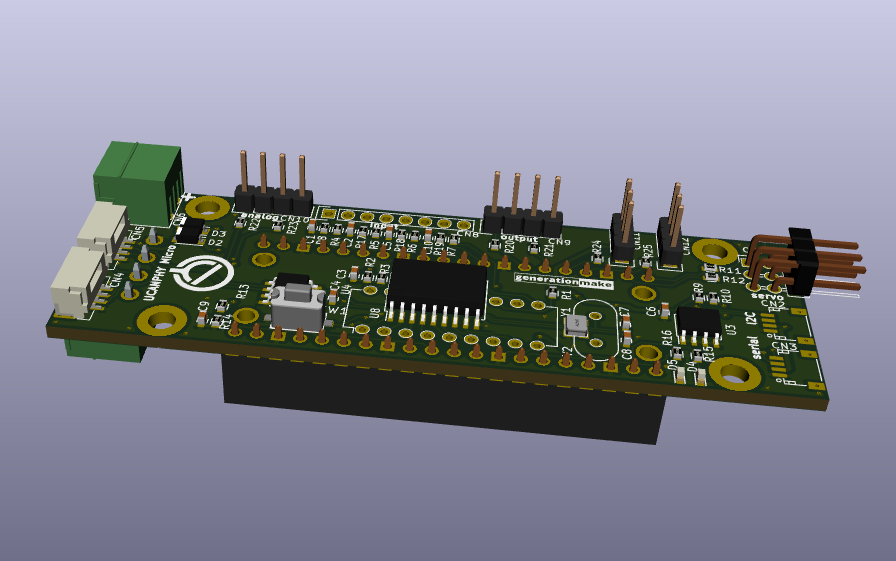
It is based on a Raspberry Pi Pico which is mounted on the back and uses a MCP2515 CAN controller. Because of the difficult supply situation in 2022 I also used a THT footprint for the controller because these parts were sometimes better available. Additionally it has an I2C eeprom to store settings in a way that they are able to survive a firmware update.
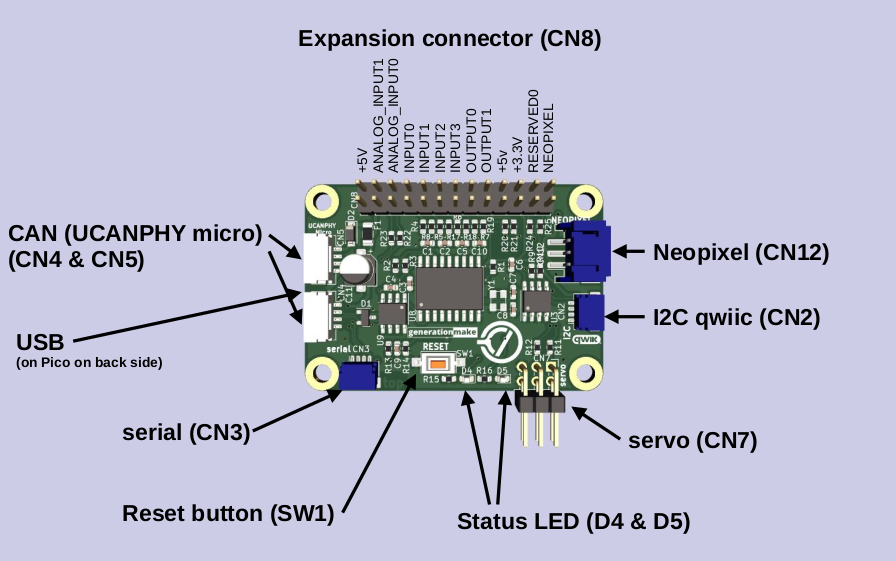
As there were some pins left I implemented more functions than we actually needed for the L3X-Z. I supports the following functions:
- measurement of bus voltage
- internal temperature of RP2040
- 4 digital inputs
- 2 analog inputs
- 2 digital outputs
- 2 servo outputs
- 1 connector for NeoPixel leds
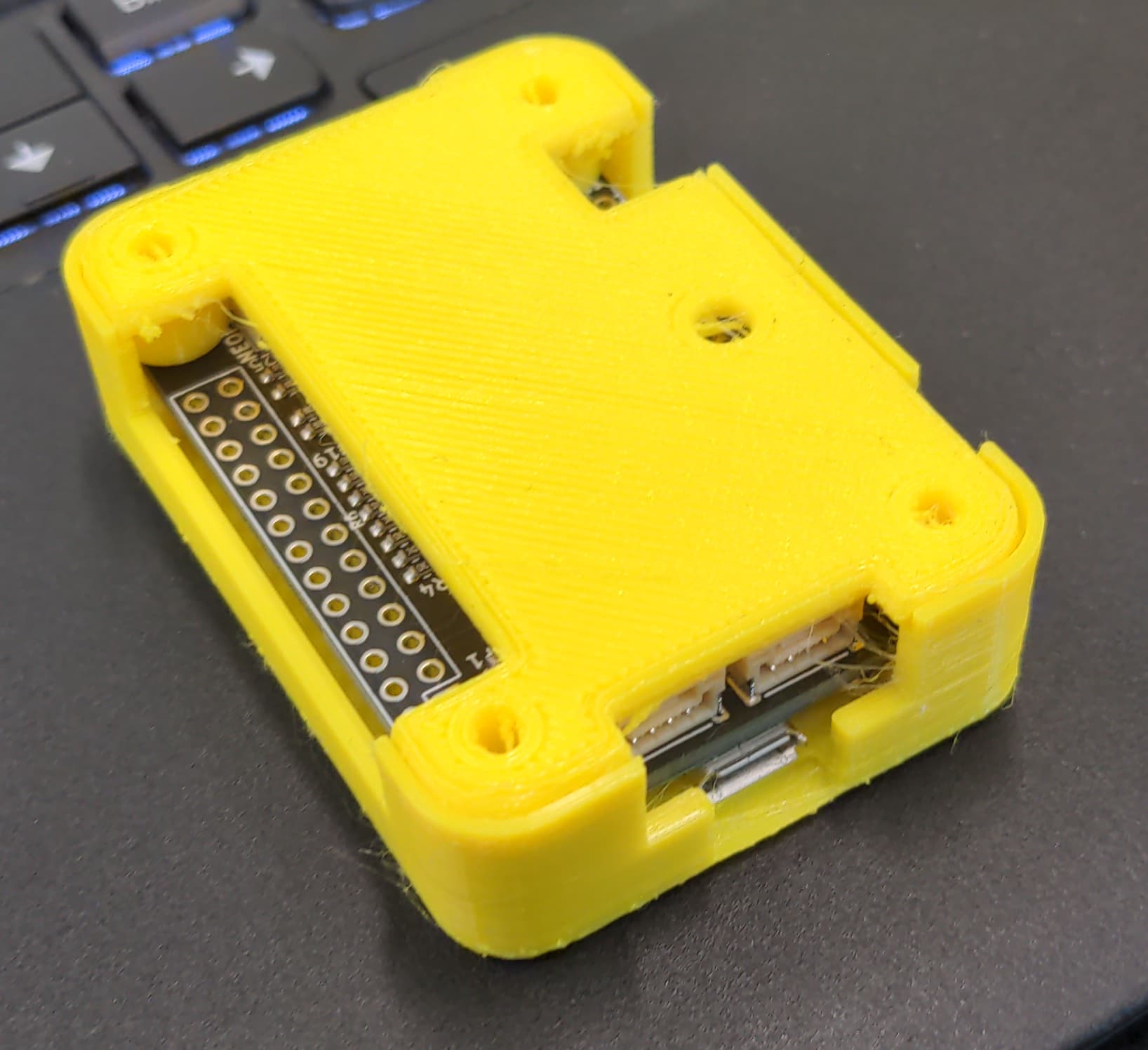
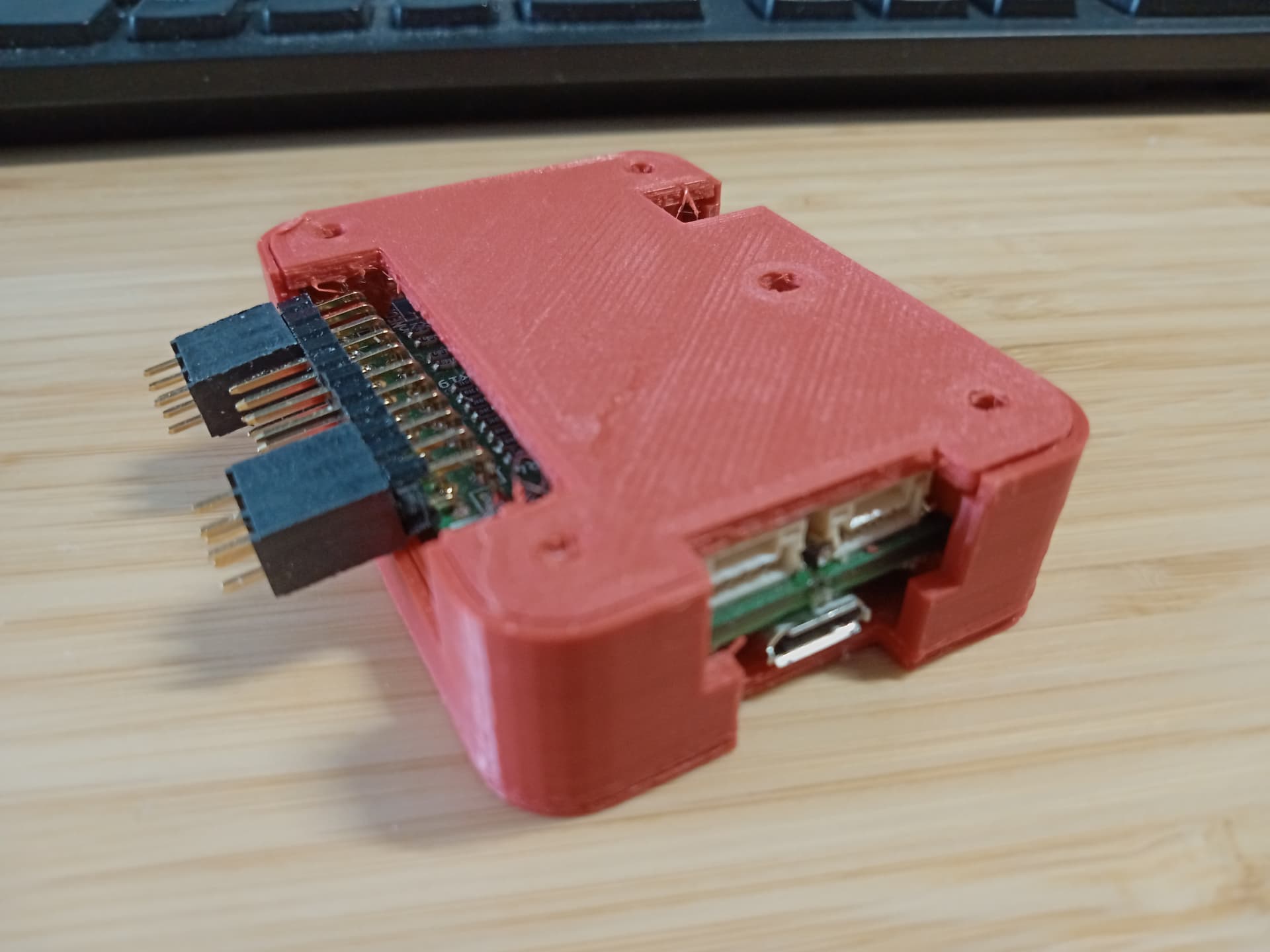
This a photo of the mostly assembled board now:

The Raspberry Pi Pico can be stacked on headers on the bottom side to easily replace it in case of failure. It turned out that this is not necessary so it can be directly soldered on the board. Unfortunatelly I didn’t take enough care of the USB connector so it is difficult to solder and connect. I will fix this in a later release.

All the design data including schematic and KiCAD project file is available in my github repo:
Software
As this is a more generic board it is open to all kinds of software. For the L3X-Z hexapod we tried to implement a software which covers all inputs and outputs of the board and gives some lighting functions but not more.
This software is based on the Arduino framework and is also available on github:
This software relies heavily on the 107-Arduino-Cyphal library and tries to make use of all its functions. Unfortunatelly it is also bound to its restrictions. So no configurable subject-ids so far. The rest like Node Info, Execute Command and Register API should work.
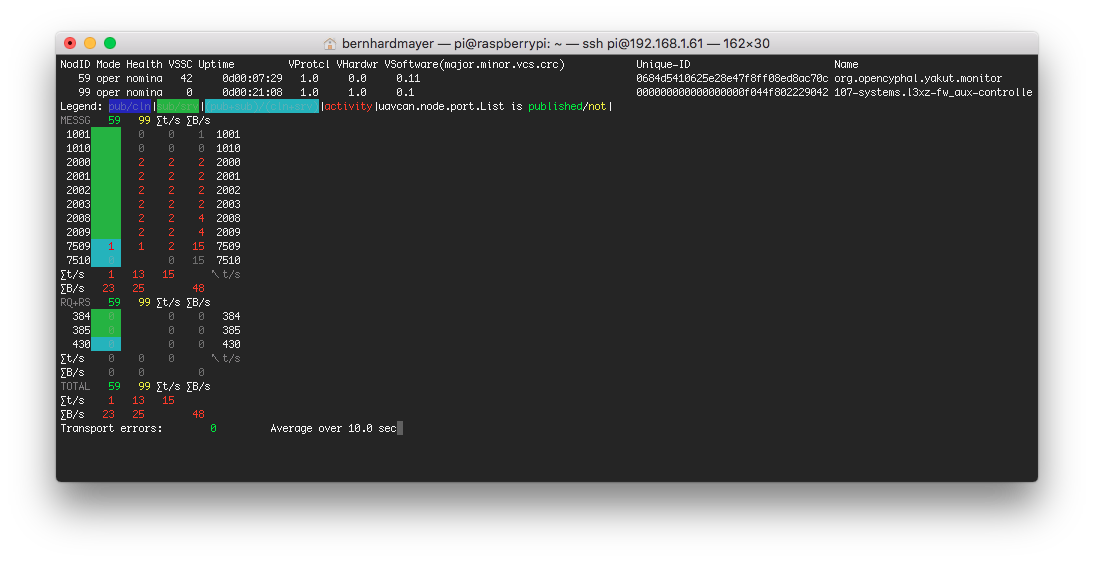
This is the output of yakut monitor:
And these are the implemented registers:
{
"99": {
"aux.updateinterval.analoginput0": 500,
"aux.updateinterval.analoginput1": 500,
"aux.updateinterval.input0": 500,
"aux.updateinterval.input1": 500,
"aux.updateinterval.input2": 500,
"aux.updateinterval.input3": 500,
"aux.updateinterval.inputvoltage": 3000,
"aux.updateinterval.internaltemperature": 10000,
"aux.updateinterval.light": 250,
"uavcan.node.description": "L3X-Z AUX_CONTROLLER",
"uavcan.node.id": 99,
"uavcan.pub.analoginput0.id": 2008,
"uavcan.pub.analoginput0.type": "uavcan.primitive.scalar.Integer16.1.0",
"uavcan.pub.analoginput1.id": 2009,
"uavcan.pub.analoginput1.type": "uavcan.primitive.scalar.Integer16.1.0",
"uavcan.pub.input0.id": 2000,
"uavcan.pub.input0.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.pub.input1.id": 2001,
"uavcan.pub.input1.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.pub.input2.id": 2002,
"uavcan.pub.input2.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.pub.input3.id": 2003,
"uavcan.pub.input3.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.pub.inputvoltage.id": 1001,
"uavcan.pub.inputvoltage.type": "uavcan.primitive.scalar.Real32.1.0",
"uavcan.pub.internaltemperature.id": 1010,
"uavcan.pub.internaltemperature.type": "uavcan.primitive.scalar.Real32.1.0",
"uavcan.sub.led1.id": 1005,
"uavcan.sub.led1.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.sub.lightmode.id": 2010,
"uavcan.sub.lightmode.type": "uavcan.primitive.scalar.Integer8.1.0",
"uavcan.sub.output0.id": 2004,
"uavcan.sub.output0.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.sub.output1.id": 2005,
"uavcan.sub.output1.type": "uavcan.primitive.scalar.Bit.1.0",
"uavcan.sub.servo0.id": 2006,
"uavcan.sub.servo0.type": "uavcan.primitive.scalar.Integer16.1.0",
"uavcan.sub.servo1.id": 2007,
"uavcan.sub.servo1.type": "uavcan.primitive.scalar.Integer16.1.0"
}
}
further development
The next planned steps are:
- implement storage of settings to eeprom
- configurable subject-ids
- rework pcb and make it smaller
If you have questions feel free to ask or post an issue on github.



 .
. ).
). .
.