I’d like to draw everyone’s attention to the growing amount of Cyphal-enabled boards in L3X-Z.
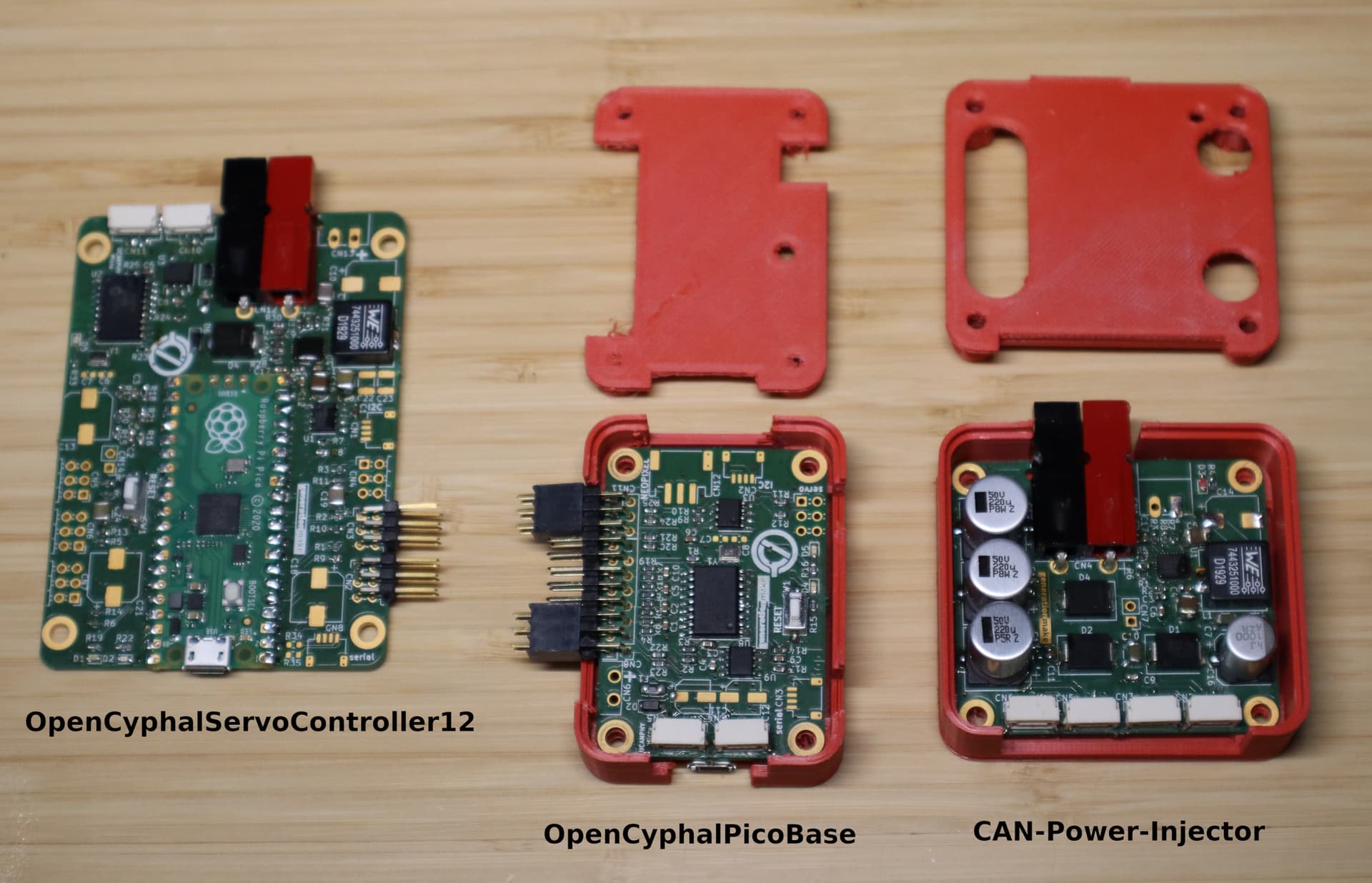
OpenCyphalPicoBase (Hardware, Firmware, Thread on OpenCyphal Forum)
This general purpose board is used for a variety of tasks such as auxiliary controller and radiation sensor.
OpenCyphalServoController12 (Hardware, Firmware)
This board allows to control up to 12 PWM RC servos via Cyphal. Within L3X-Z its used for controlling the hydraulic valves.
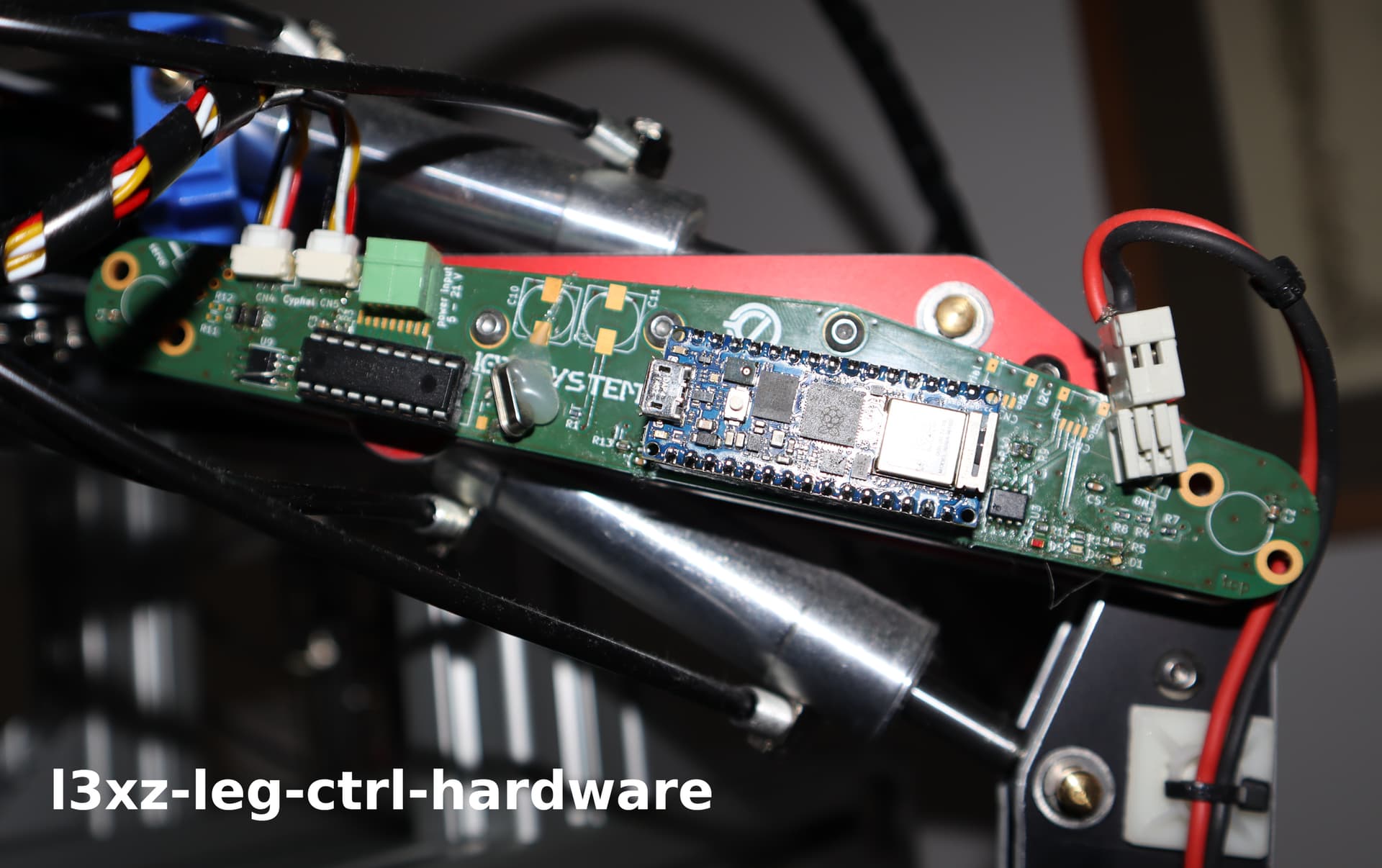
l3xz-leg-ctrl-hardware (Hardware, Firmware)
This board situated on each leg of L3X-Z determines the joints angular position with magnetic position sensors and publishes it using Cyphal to various consumers.
CAN-Power-Injector (Hardware)
No Cyphal board but allows to inject 5V (and up to 5A) into the CAN bus supplying all connected devices. No more separate wires for power supply needed.