Here is a brief example I came across while testing my PoC implementation (currently on a branch named multicasting). Here we have a command (copy-pasted from the integration test suite):
$ pyuavcan -v pub 4321.uavcan.diagnostic.Record.1.1 '{severity: {value: 6}, timestamp: {microsecond: 123456}, text: "Hello world!"}' 1234.uavcan.diagnostic.Record.1.1 '{text: "Goodbye world."}' 555.uavcan.si.sample.temperature.Scalar.1.0 '{kelvin: 123.456}' --count=3 --period=0.1 --priority=slow --heartbeat-fields='{vendor_specific_status_code: 54}' --tr='UDP("127.0.0.51")'
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands._subsystems.transport: Configuring the transport from command line arguments; environment variable PYUAVCAN_CLI_TRANSPORT is ignored
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands._subsystems.transport: Resulting transport configuration: [UDPTransport(<udp anonymous="false" srv_mult="1" mtu="1200">127.0.0.51</udp>, ProtocolParameters(transfer_id_modulo=18446744073709551616, max_nodes=65535, mtu=1200), local_node_id=51)]
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Publication set: [Publication(uavcan.diagnostic.Record.1.1(timestamp=uavcan.time.SynchronizedTimestamp.1.0(microsecond=123456), severity=uavcan.diagnostic.Severity.1.0(value=6), text='Hello world!'), Publisher(dtype=uavcan.diagnostic.Record.1.1, transport_session=UDPOutputSession(OutputSessionSpecifier(data_specifier=MessageDataSpecifier(subject_id=4321), remote_node_id=None), PayloadMetadata(extent_bytes=300)))), Publication(uavcan.diagnostic.Record.1.1(timestamp=uavcan.time.SynchronizedTimestamp.1.0(microsecond=0), severity=uavcan.diagnostic.Severity.1.0(value=0), text='Goodbye world.'), Publisher(dtype=uavcan.diagnostic.Record.1.1, transport_session=UDPOutputSession(OutputSessionSpecifier(data_specifier=MessageDataSpecifier(subject_id=1234), remote_node_id=None), PayloadMetadata(extent_bytes=300)))), Publication(uavcan.si.sample.temperature.Scalar.1.0(timestamp=uavcan.time.SynchronizedTimestamp.1.0(microsecond=0), kelvin=123.456), Publisher(dtype=uavcan.si.sample.temperature.Scalar.1.0, transport_session=UDPOutputSession(OutputSessionSpecifier(data_specifier=MessageDataSpecifier(subject_id=555), remote_node_id=None), PayloadMetadata(extent_bytes=11))))]
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Publication cycle 1 of 3 completed; sleeping for 0.099 seconds
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Publication cycle 2 of 3 completed; sleeping for 0.098 seconds
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Publication cycle 3 of 3 completed; sleeping for 0.098 seconds
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: UDPTransportStatistics(received_datagrams={MessageDataSpecifier(subject_id=7509): SocketReaderStatistics(accepted_datagrams={}, dropped_datagrams={51: 3}), ServiceDataSpecifier(service_id=430, role=<Role.REQUEST: 1>): SocketReaderStatistics(accepted_datagrams={}, dropped_datagrams={})})
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Subject 7509: SessionStatistics(transfers=3, frames=3, payload_bytes=21, errors=0, drops=0)
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Subject 4321: SessionStatistics(transfers=3, frames=3, payload_bytes=63, errors=0, drops=0)
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Subject 1234: SessionStatistics(transfers=3, frames=3, payload_bytes=69, errors=0, drops=0)
2020-12-07 04:55:13 518515 INFO pyuavcan._cli.commands.publish: Subject 555: SessionStatistics(transfers=3, frames=3, payload_bytes=33, errors=0, drops=0)
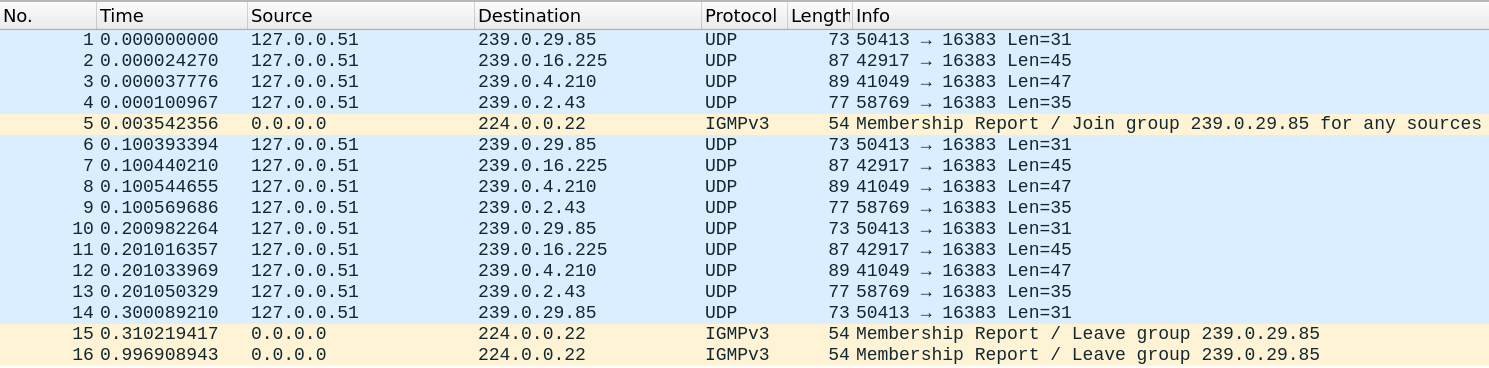
Shortly after launch the node subscribed to the heartbeat subject (for reasons of node-ID collision detection). Its subject-ID is 7509 = (29 << 8) | 85, which translates into 239.0.29.85. The command takes 300 ms to execute (3 message sets, interval 0.1 seconds). All transfers were single-frame transfers.