Good morning everyone ![]()
![]()
I’m part of a small group which is working on
building a Arduino MKR Vidor 4000 based quadcopter flight controller with all the features found in state-of-the art quadcopter designs making resourceful use of all components (MCU, FPGA, WiFi NINA, …) located on the Vidor 4000 in order to control a Micro Aerial Vehicle (MAV) .
In our opinion the Arduino MKR Vidor 4000 is an especially interesting board for such an application since the onboard FPGA enables interesting capabilities, such as being used as an optical flow sensor in combination with a downward facing camera.
The current block diagramm looks like that:
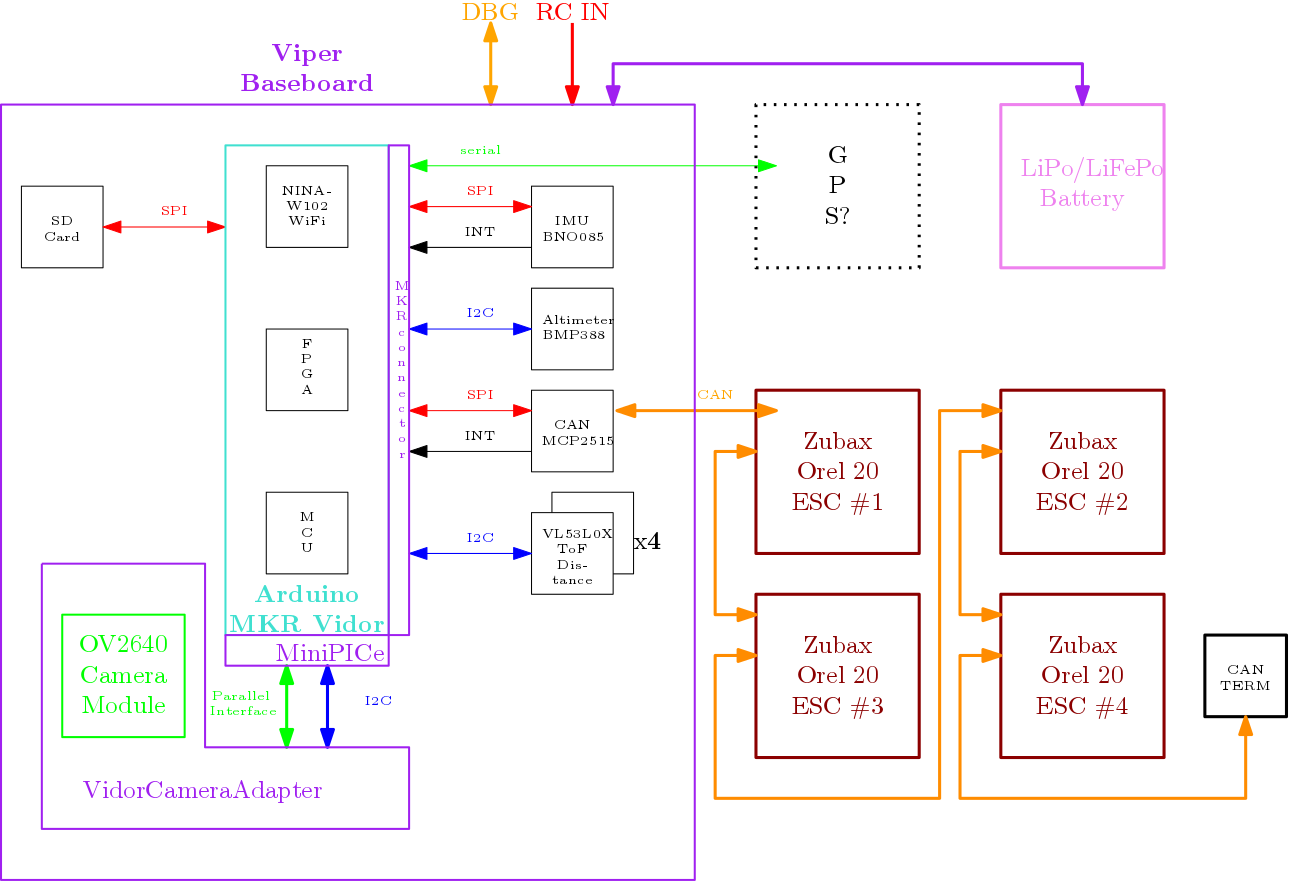
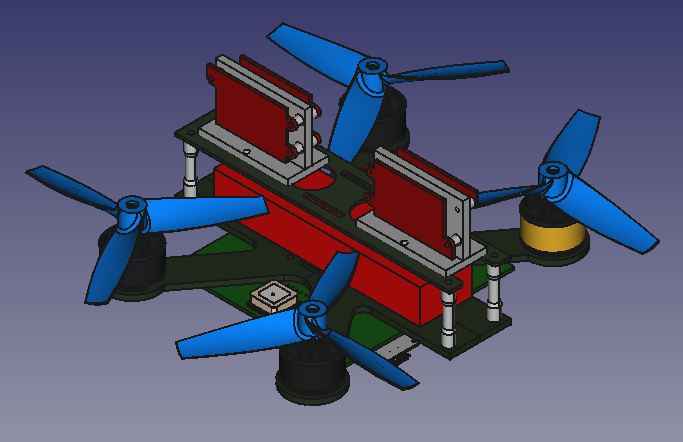
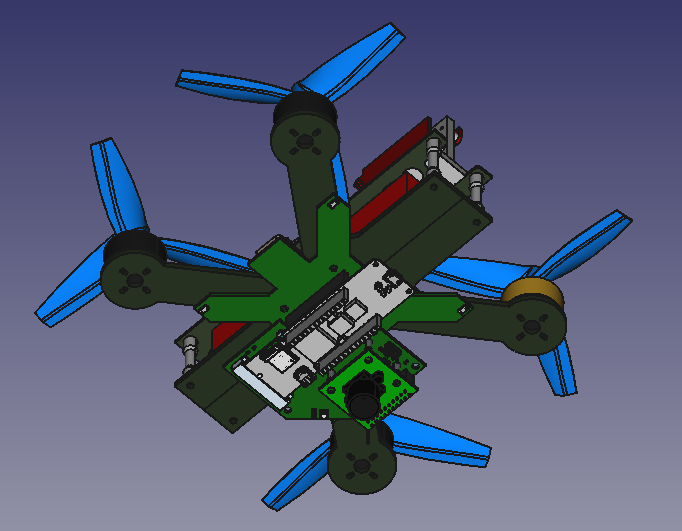
A current 3D rendering of the quadcopter and some of its electronics can be seen here (the red boards on top are Zubax Orel 20 ESCs).
The repositories containing all relevant code are located within the 107-systems GitHub organisation. One repository that might be of special interest to this community is 107-Arduino-UAVCAN which is currently work in progress and will provide an abstraction of libcanard in the form of an Arduino library.
Some more eye candy: Here’s a picture of the Arduino MKR Vidor 4000 with a MKR CAN Shield on top and the VidorCameraAdapter attached to it’s MiniPCIe slot.

I’m looking forward to hear your thoughts on this one ![]()
Edit: Adding pictures after being granted rights to more than one picture by Pavel (thank you ![]() )
)
 ) and see the frames there. Thank you!
) and see the frames there. Thank you! 


 Unfortunately it’s still not quite cutting it.
Unfortunately it’s still not quite cutting it.