ARRAY OF PORTS
I suggest adding a new term to section 6.8. uavcan.register of the specification. Let’s call it an array of ports or a group of ports.
Problem description
There are few cases where we need to handle a large number of subjects with the same data type and meaning. Typically, this happens on the subscriber side. The problem is pretty clear in the autopilot ESC feedback example. Let’s take a look.
In UAVs we typically want to support 16, but more likely up to 32 esc/servo. If an ESC/servo publishes only a single subject (let’s say feedback), the autopilot will have the following pairs of registers:
# Publishers:
uavcan.pub.setpoint.id=2000 and uavcan.pub.setpoint.type=reg.udral.service.actuator.common.sp.Vector31
uavcan.pub.readiness.id=2001 and uavcan.pub.readiness.type=reg.udral.service.common.Readiness
# Subscribers:
uavcan.sub.feedback.0.id=2100 and uavcan.sub.feedback.0.type=reg.udral.service.actuator.common.Feedback
uavcan.sub.feedback.1.id=2101 and uavcan.sub.feedback.1.type=reg.udral.service.actuator.common.Feedback
…
uavcan.sub.feedback.31.id=2131 and uavcan.sub.feedback.31.type=reg.udral.service.actuator.common.Feedback
Here the autopilot must have 32 port values in parameters and show 64 registers for subscribers: 32 IDs and 32 types.
According to the current UDRAL, each ESC/servo interface should have 4 subjects: feedback, status, PowerTs and PlanarTs. This means 4 * 32 = 128 ID and 4 * 32 = 128 type registers on the autopilot side.
Zubax Telega publishes 7 ESC related topics. If we want to fully support it, an autopilot should have 7 * 32 * 2 = 448 registers total.
A user may want to add more topics.
This is a pretty easy example and it will rapidly grow into a complex system that is hard to manually maintain even with Yukon.
It would be nice to be able to group the same things together somehow without significantly affecting the flexibility of the system.
Suggestion
I suggest introducing a new term called an array of ports to handle the situation in the example above in a single registers pair. The type register indicates the data type as usual. The ID register indicates the first port identifier in the group. Other port identifiers are automatically incremented sequentially. So, if the identifier register has 2000 and the number of ports is 32, their ID will be 2000,…,2031. Internally the application should subscribe as many times as we have ports, so port.List will have all these 2000,…,2031 ports and we can introspect the Cyphal network as usual.
I see 3 ways how to put the number of ports into this register pair:
- A type register value may end with [N] to indicate that we handle. For example:
reg.udral.service.actuator.common.Feedback[32]. This solution will probably break something, so we probably should skip it. - A
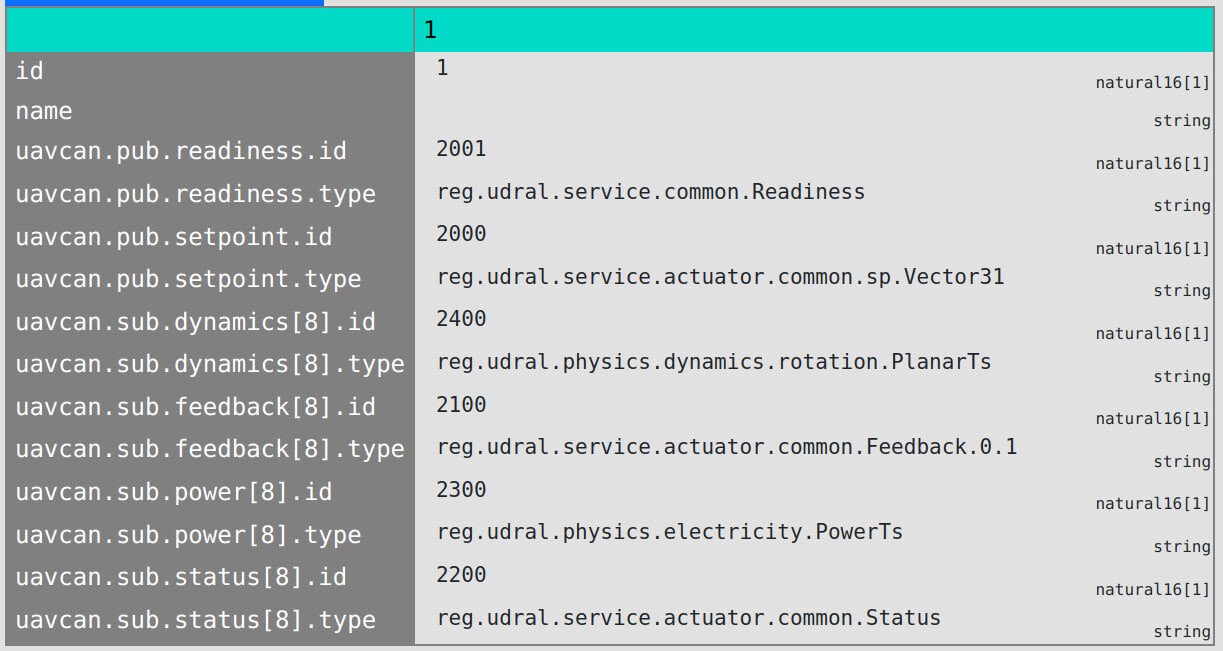
PORT_NAMEmay end with [N], for example:uavcan.sub.feedback[32].iduavcan.sub.feedback[32].type. - We can come up with a new standard register name. It might be:
uavcan.sub_array.feedback[32].idor something like that.
Notes
- This feature most likely should be considered only for a group of subscribers, but not for publishers. Though it is clear to think about a group of setpoints as it is described in UDRAL, I’m not sure if this logic applies to redundant sensors. A sensor doesn’t need to worry about its number in the system - that’s actually why we don’t need a sensor_idx in its message.
- Currently
[and]symbols are not allowed in the register name, so we should add them - port.List should keep port identifiers separately as usual. If we have group of 32 ports, we should put all of their identifiers into port.List
- Diagnostic utilities such as Yukon should understand that a single pair of type and ID registers are represent an array. Yukon may also benefit by grouping similar ports on the Monitor window
Drawbacks
I see a few drawbacks here:
- It occupies extra port identifiers if we only need the last one. If we only have feedback from the eight ESC, we still need to occupy at least 8 port identifiers. Since we have 8k port identifiers, I think this is not really significant.
- It may be confusing. If we have feedback only from the eight ESC with port id 2007, we should set 2000 to the register value.
- In a really complex network this feature may lead to a fragmentation. We still have 8k ports identifiers.
This feature significantly reduces the number of registers in some applications, making integration and manual configuration much easier. At the same time, it has some effect on the configuration flexibility. Should we consider it?