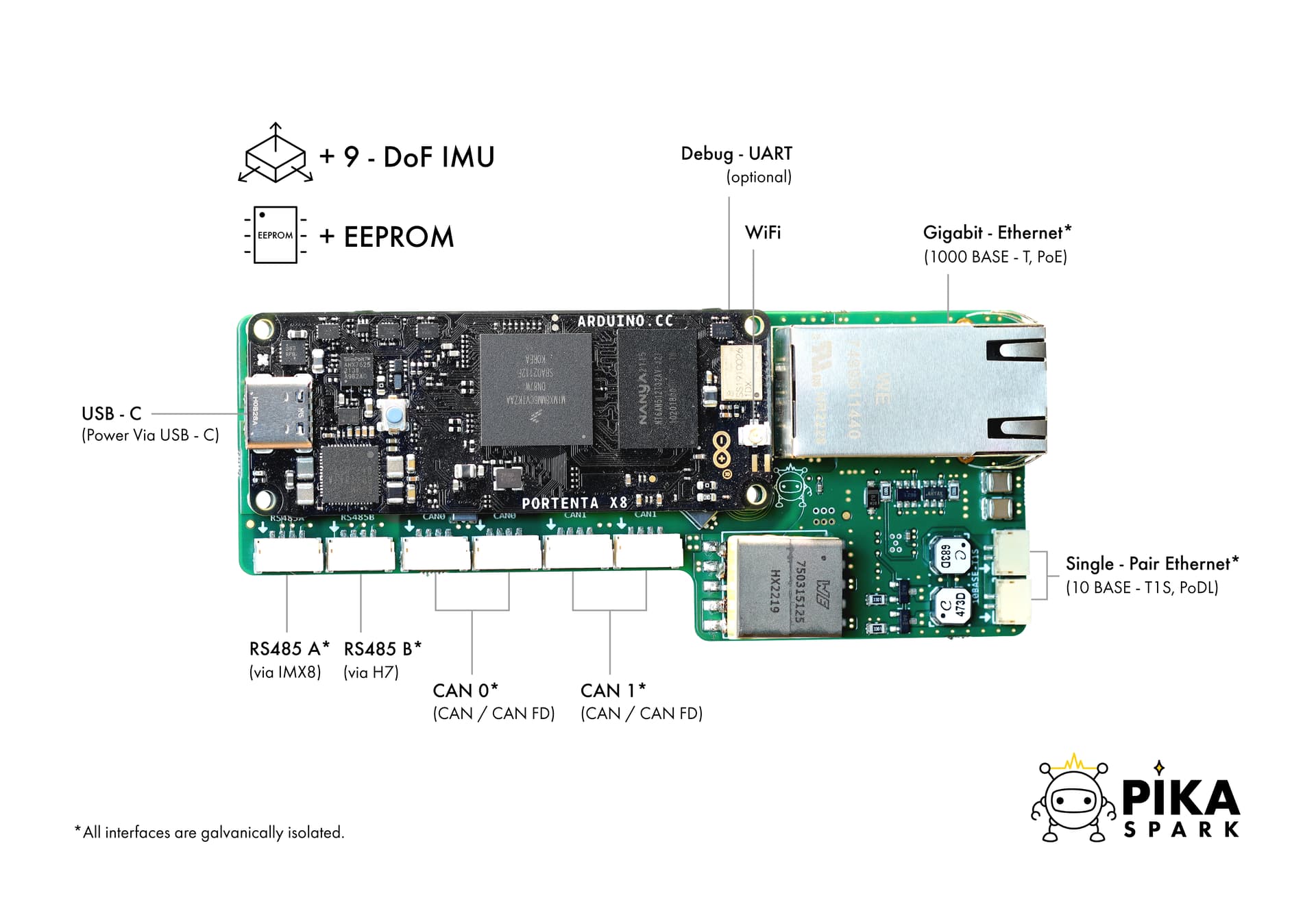
For quite some time I’ve been working on the Pika Spark, which is a Arduino Portenta X8 based micro robot control system combining an unprecedented amount of computing power and interfaces within an extremely small form factor.
Naturally Cyphal is going to be a first-class citizen .
Although I’ve laid the groundwork for this quite some time ago only recently have I been able to sit down and write this up: A simple guide on how-to run Yakut on Pika Spark in a CAN-based Cyphal network. (And don’t you worry, no need to copy-paste out of the article, ready-made bash scripts w/ integrated error handling for your usage are available).
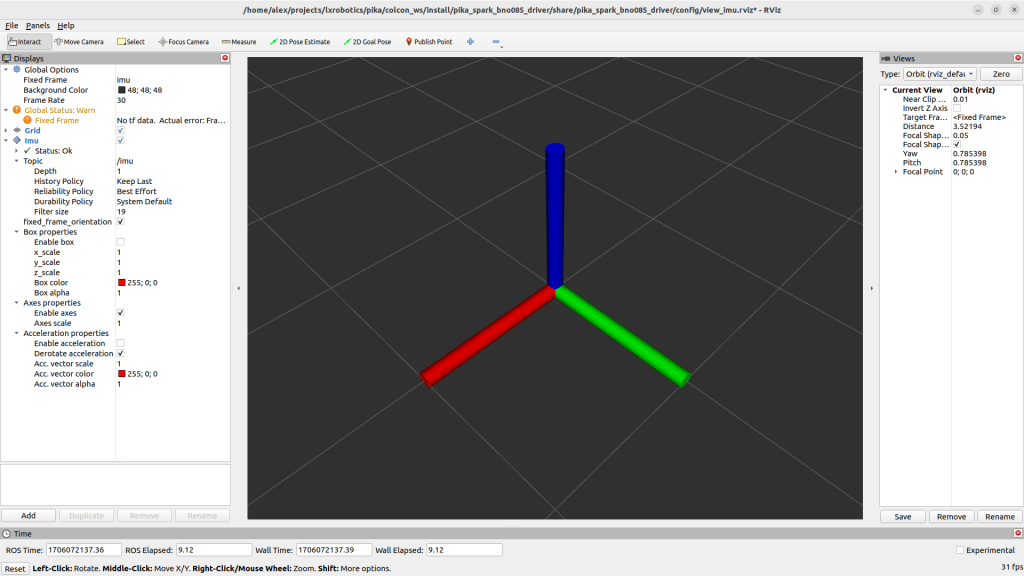
Another week, another tutorial … this time I’ll showcase how to use Pika Spark’s onboard IMU for attitude estimation, streaming the IMU’s data via ROS from the Pika Spark to your development PC and then visualizing it via ROS tools: How-to obtain a BNO085 IMU's attitude and visualize it via ROS - Pika Spark .
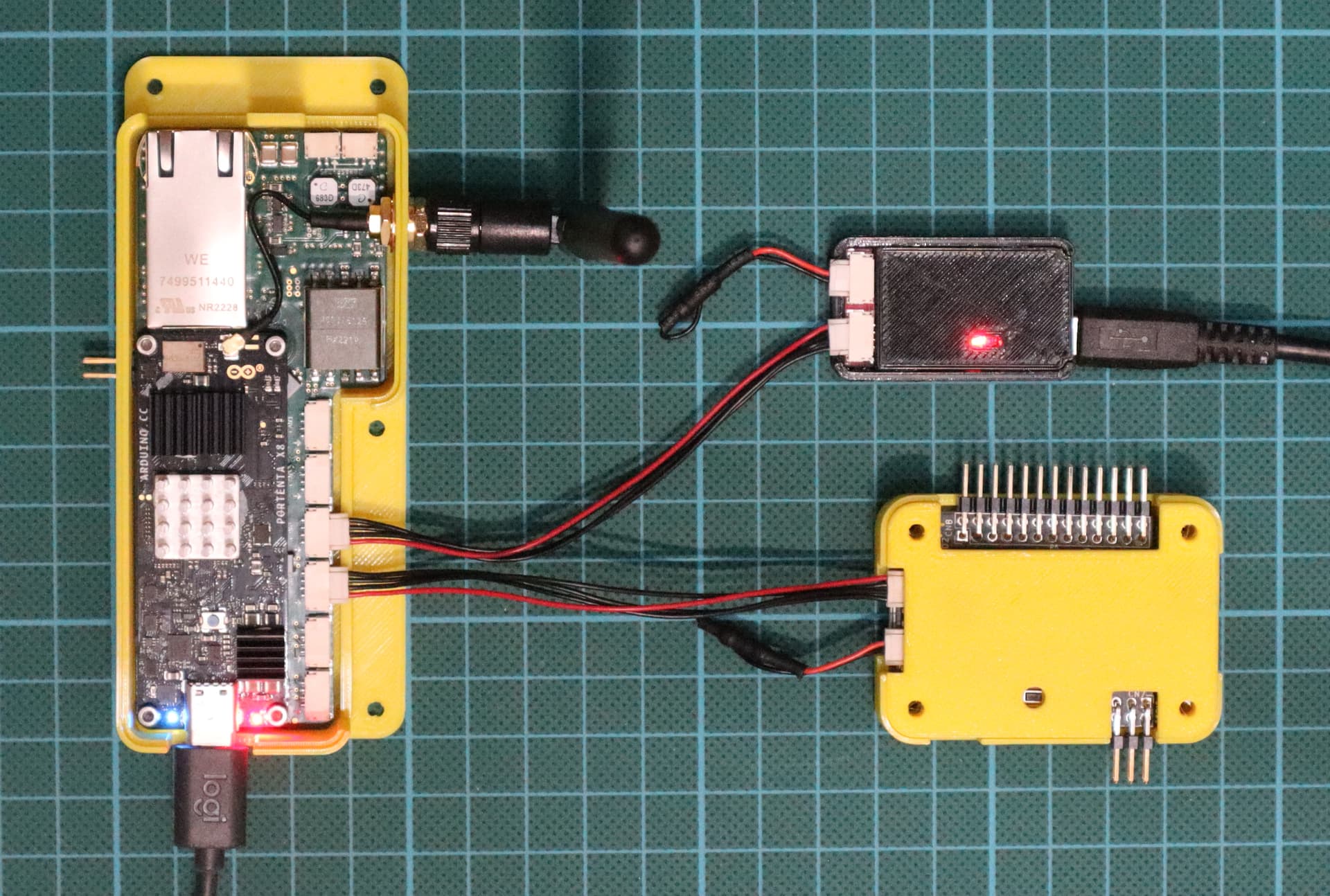
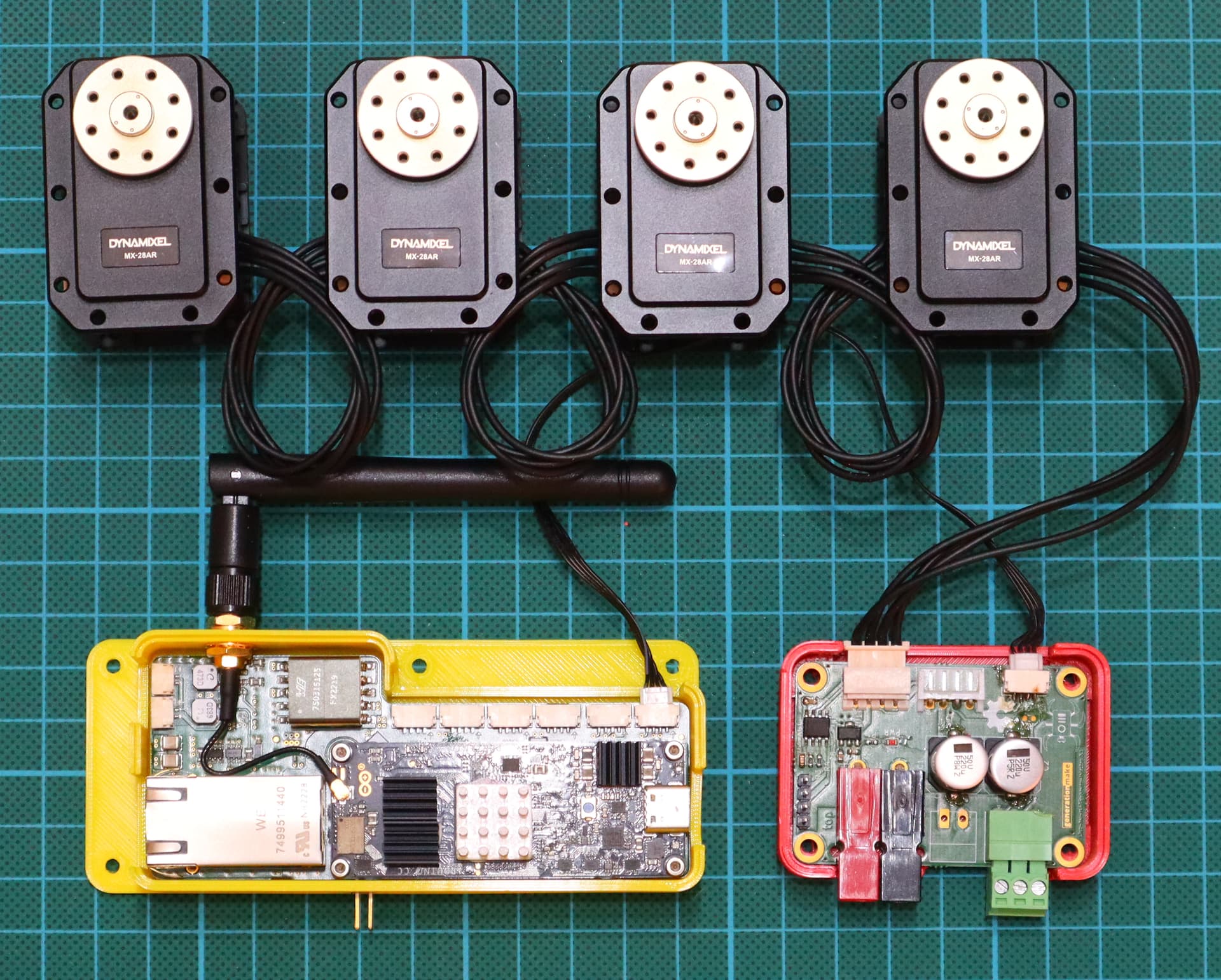
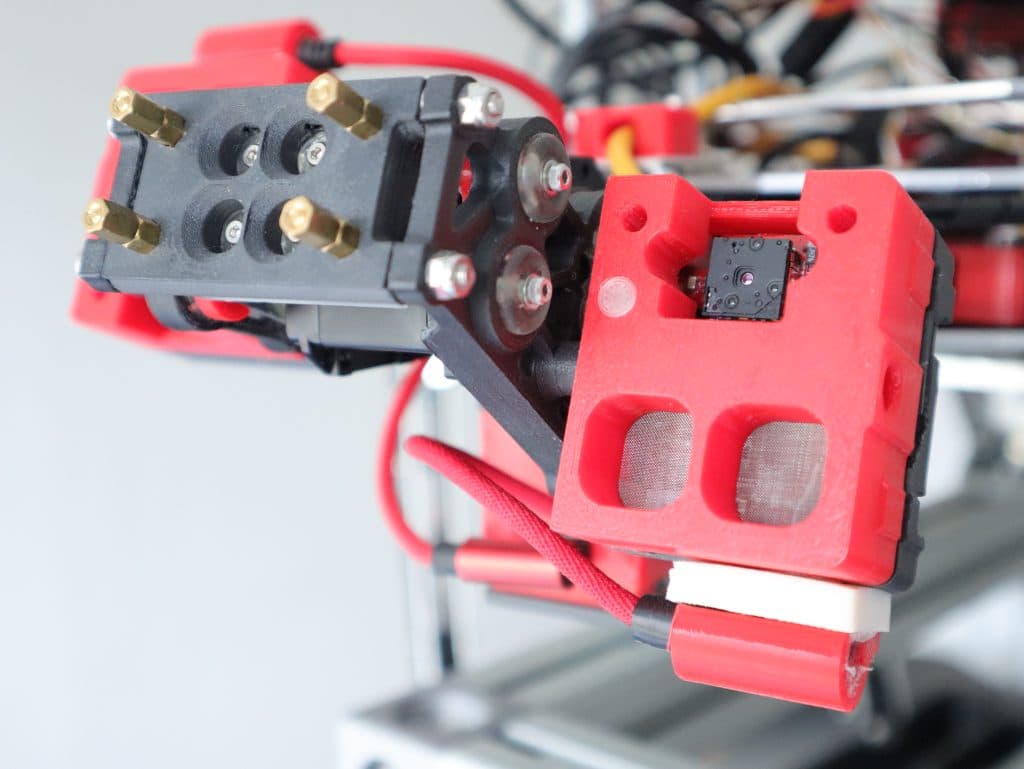
Here’s a small case-study that demonstrates how to the Pika Spark can be used to control the Dragonbeard pan/tilt color/thermal imaging head designed by @scottdixon (still amazed by Scott’s fantastic design work and prototyping ).
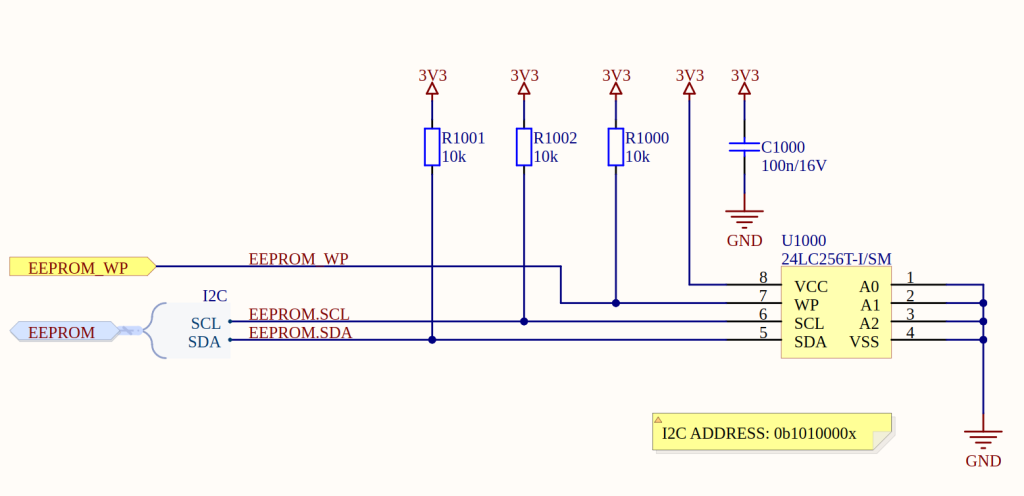
Pika Spark has an onboard EEPROM for storing configuration and user-specific data. So far it has been mostly undocumented how to do this, but fear not, I finally got around to publishing a tutorial for this: How-to access Pika Spark's EEPROM via I2C - Pika Spark
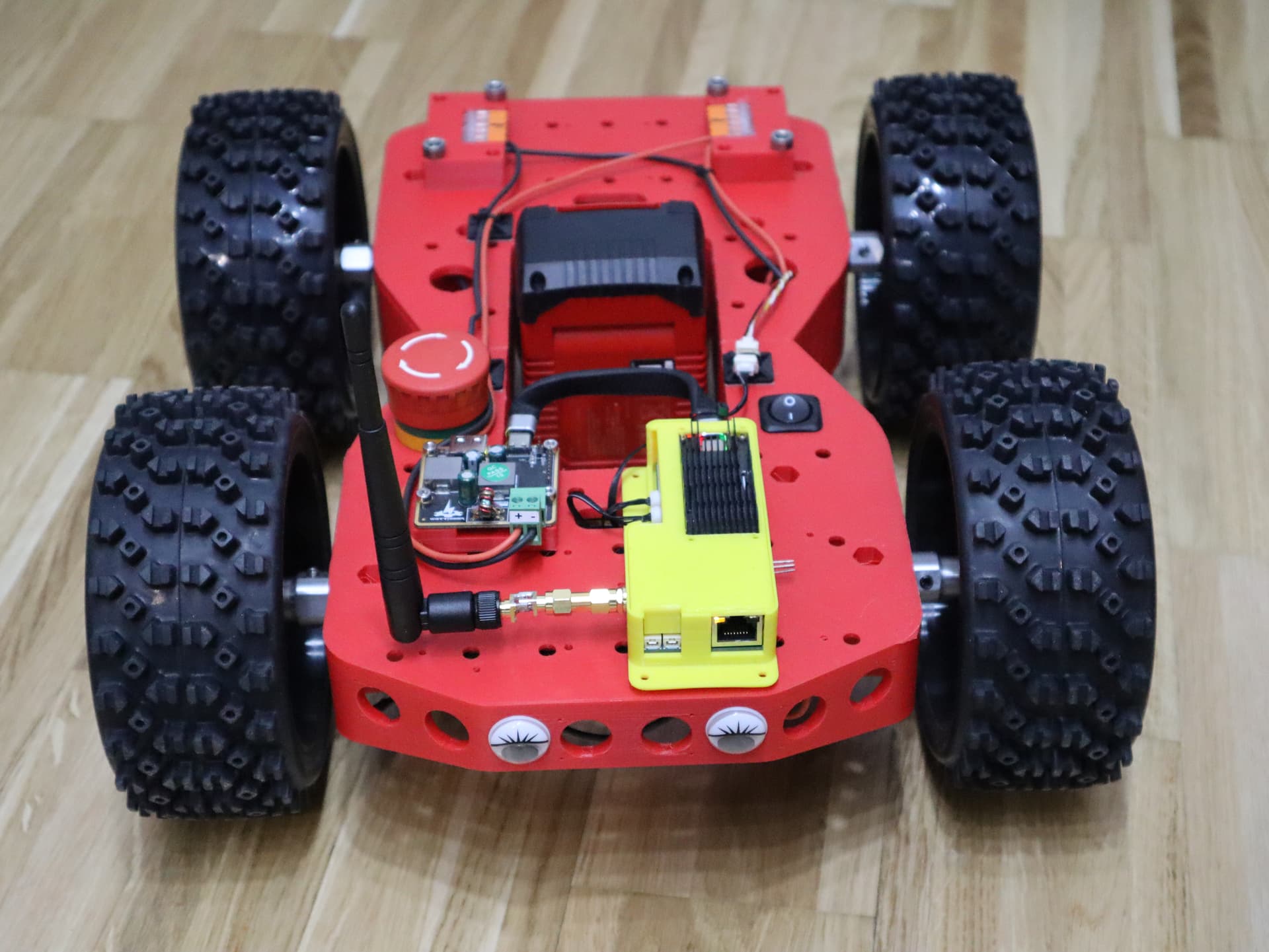
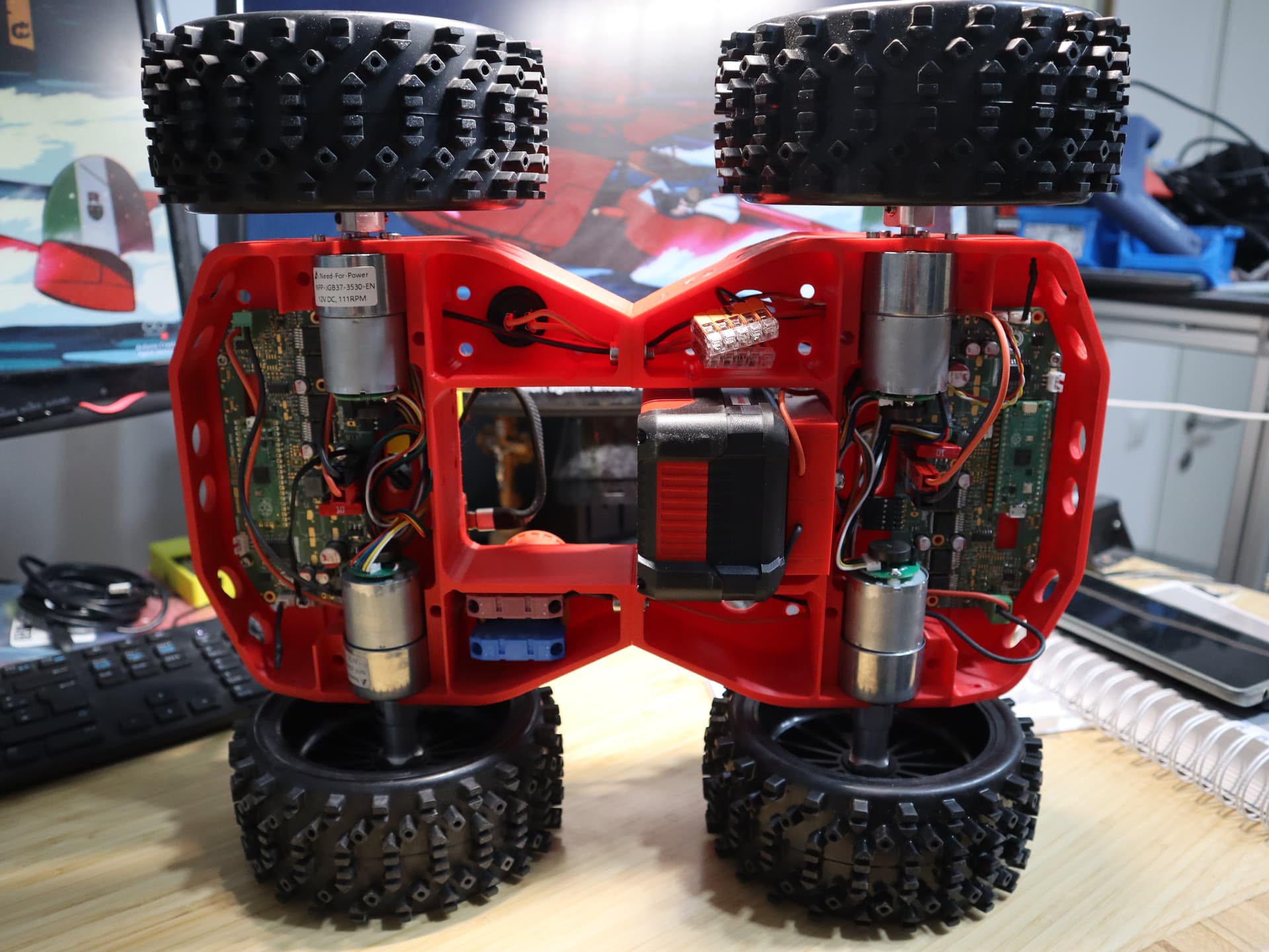
You’ve already seen the pictures, and I’ve already shared the video. Here it is now - the blog post written up with the technical details behind this demo : Pika Spark as a generic robot controller - Pika Spark .
There’s been some time since my last update but I finally got around to writing up the foundational tutorial on how to use the fully galvanically isolated CAN interfaces of the Pika Spark: How-to use Pika Spark's CAN interface - Pika Spark .
Now also: detailed tutorial on how to both receive and transmit data via Pika Spark’s fully galvanically isolated RS485 port. Note: configuration of the IMX8’s UART is done via Device-Tree magic so that from a user’s perspective is a simple /dev/tty .
Once again did we participate at a major robotics competition, the European Land Robot Trials (ELROB) 2024 in Trier ( ). Of the several scenarios available we partook in “Reconnoitering of structures”, which this year took place mostly outside (not so much structures) and in inclined terrain (which confused our algorithm for autonomous exploration, which assumed plane surfaces).
Again, Pika Spark leveraging OpenCyphal for Cyphal/CAN communication (via 107-Arduino-Cyphal) was used for controlling the robot.
Here are a couple of pictures, an overall event report may happen only in the very distant future, as I’ve not even written up last years event.