I wanted to see if there was a command for file transfer only, I didn’t understand how it can be done.
I tried the firmware upload anyway and I saw that in my STM32 node I get the begin_firmware_upload command with the correct file name. At this point I try to change HeartBeat status to software upload thinking that yakut initiates the transfer or some other file service. I have tried to subscribe to all the file functions but I am not receiving anything.
Is there any particular strategy to follow for receive file?
Thank you
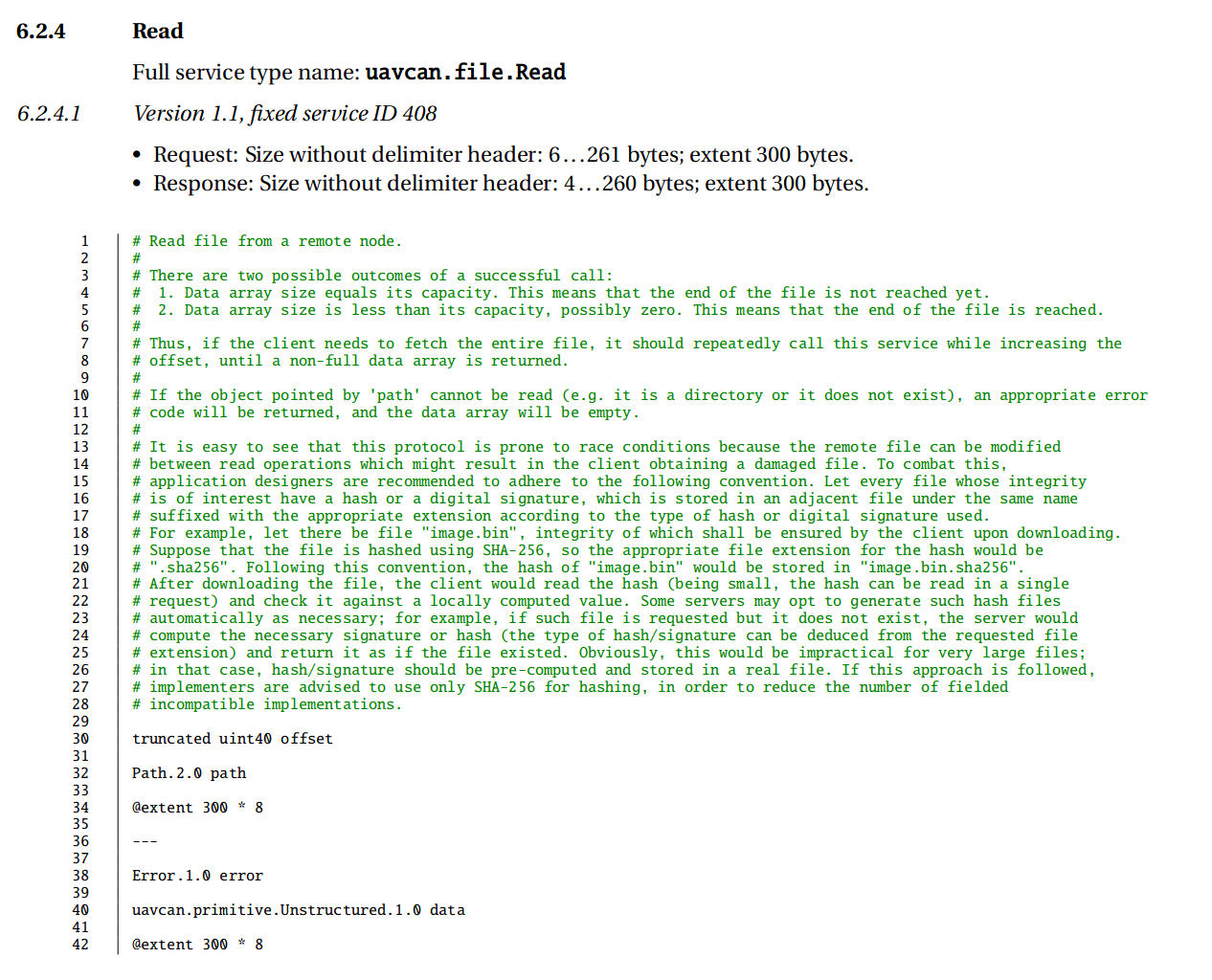
Yakut currently does not have a file transfer command other than the file server. Aside from its ability to issue firmware update requests, the file server command is purely passive: it simply waits for nodes to send it file read requests. Thus, to transfer a file to a remote node, you need to make that node read the file from the file server by sending it uavcan.file.Read requests.
The service is also documented in Specification in a more readable form:
If you want your node to receive a file passively, you can simply make it serve uavcan.file.Write instead, and then issue write requests remotely. You can use Yakut for that (replace SCREAMING placeholders with appropriate values):
yakut call YOUR_NODE_ID uavcan.file.Write '{offset: YOUR_FILE_OFFSET, path: DESTINATION_FILE_PATH, data: YAML_BINARY_DATA}'
Although it would be far easier to simply write a Python script based on PyCyphal, perhaps using pycyphal.application.file.FileClient.
If you would like to contribute a file write command to Yakut, that would be welcome.
You are misunderstanding how the firmware update is supposed to work. Also, note that it cannot be used for general-purpose file transfer. Read the docs for uavcan.node.ExecuteCommand, specifically for COMMAND_BEGIN_SOFTWARE_UPDATE.
I had also already tried that mode you indicated, as soon as I launch yakut file-server --update-software 100 (my node), yakut replies:
yakut.cmd.file_server: request to node 100 to update its software: uavcan.node.ExecuteCommand.Request.1.1 (command = 65533, parameter = 'Estimate4.module_master-1.1.app.hex')
I get the correct command and start the file_read_request, yakut replies:
2022-08-11 21:51:15 0051004 WAR pycyphal.application.heartbeat_publisher: HeartbeatPublisher (heartbeat = uavcan.node.Heartbeat.1.0 (uptime = 2, health = uavcan.node.Health.1.0 (value = 0), mode = uavcan.node.Mode.1.0 (value = 0), vendor_specific_status_code = 4), priority = NOMINAL, period = 1.0) sending heartbeat expired
but the heartbeat of yakut (127) and my node 100 continues to work.
Maybe I’m doing something wrong.
I am sure to send request_file_read with correct path (array and length as in BeginFirmwareUpdate request command) and on first attempt offset = 0.
Thank you for your time
You are using a custom version of PyCyphal which might be misbehaving. The upstream version cannot emit that log message. I cannot give you any advice in this case. Consider switching to the upstream version.
Regardless, this warning has nothing to do with the file update process, it merely means that the CAN interface is either malfunctioning or is being overwhelmed with excess bandwidth. Check its settings.
If I use y mon everything works correctly I see the nodes give the commands, I do the subscriptions, read/write register and the transport errors are always = 0
i have install 1.9.0 pip intall -U pycypal
With candump -decaxta slcan0, I actually see my request in TX and the answer in RX but my subscription does not enter. I try to see the actual incoming response if I can pinpoint the problem
Hi Pavel, I checked with can_dump and my application. No lost frames, everything ok. But with yakut it never goes into read_response.
At this point I redid the application with 2 STM32 one in request_file and one in send_file and everything works correctly.
I’m no one to say that something is wrong but in response yakut starts directly with the file without sending the correct file_read_response 408.
I don’t understand this statement. Are you saying that Yakut sends malformed responses? That is exceedingly unlikely. Can you share relevant bits of your application here for review?
- I simply do this subscription and expect to come in upon receipt of the response.
Subscription →
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindResponse,
uavcan_file_Read_1_0_FIXED_PORT_ID_,
uavcan_file_Read_Response_1_0_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC * 3,
&rx);
if (res < 0) NVIC_SystemReset();
}
-
My application receive command 65533 + file name (BEGIN_FIRMWARE_UPDATE)
-
and my response is OK
- NOW I make Request →
uavcan_file_Read_Request_1_1 remotefile = {0};
remotefile.path.path.count = strlen(state->fw_filename);
memcpy(remotefile.path.path.elements, state->fw_filename, remotefile.path.path.count);
remotefile.offset = 0;
uint8_t serialized[uavcan_file_Read_Request_1_1_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
const int8_t err = uavcan_file_Read_Request_1_1_serialize_(&remotefile,&serialized[0], &serialized_size);
if (err >= 0)
{
const CanardTransferMetadata meta = {
.priority = CanardPriorityHigh,
.transfer_kind = CanardTransferKindRequest,
.port_id = uavcan_file_Read_1_1_FIXED_PORT_ID_,
.remote_node_id = state->fw_node_id, (Yakut ID that send cmd BEGIN_FIRMWARE_UPDATE)
.transfer_id = (CanardTransferID) (state->fw_next_transfer_id++),
};
send(state,
monotonic_time + MEGA,
&meta,
serialized_size,
&serialized[0]);
}
}
Section meggage_rx
BREAKPOINT
( ENTER HERE ONLY WITH SECOND STM32 THAT SEND FILE_READ_RESPONSE (for test) , I DON’T GO IN WITH YAKUT)
if (transfer->metadata.transfer_kind == CanardTransferKindResponse) {
if…
if …
else if (transfer->metadata.port_id == uavcan_file_Read_1_1_FIXED_PORT_ID_)
{
uavcan_file_Read_Response_1_1 resp = {0};
size_t size = transfer->payload_size;
if (uavcan_file_Read_Response_1_1_deserialize_(&resp, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
// TODO: Rx file…, save data…
// if file complete stop else request next block
processRequestReadFile(state, &req);
}
Packet with candump send from yakut ( Verify with my received packet on Serial.Print )
(1660310070.925432) slcan0 RX - - 0F663FE4 [8] 00 00 00 00 00 20 73 A0 ‘… s.’
(1660310070.925466) slcan0 RX - - 0F663FE4 [8] 74 69 6D 61 34 2E 6D 00 ‘tima4.m.’
(1660310070.925467) slcan0 RX - - 0F663FE4 [8] 6F 64 75 6C 65 5F 6D 20 'odule_m ’
(1660310070.925468) slcan0 RX - - 0F663FE4 [8] 61 73 74 65 72 2D 31 00 ‘aster-1.’
(1660310070.958466) slcan0 RX - - 0F663FE4 [8] 2E 31 2E 61 70 70 2E 20 '.1.app. ’
(1660310070.958497) slcan0 RX - - 0F663FE4 [6] 68 65 78 19 2E 40 ‘hex…@’
(1660310070.958499) slcan0 RX - - 1A6CFFE4 [2] 00 E0 ‘…’
(1660310070.960273) slcan0 TX - - 0E66327F [8] 00 00 00 01 23 21 2F A0 ‘…#!/.’
(1660310070.960471) slcan0 TX - - 0E66327F [8] 62 69 6E 2F 62 61 73 00 ‘bin/bas.’
(1660310070.960525) slcan0 TX - - 0E66327F [8] 68 0A 23 20 43 6F 6D 20 'h.# Com ’
(1660310070.960575) slcan0 TX - - 0E66327F [8] 6D 6F 6E 20 43 79 70 00 ‘mon Cyp.’
(1660310070.960620) slcan0 TX - - 0E66327F [8] 68 61 6C 20 72 65 67 20 'hal reg ’
(1660310070.960665) slcan0 TX - - 0E66327F [8] 69 73 74 65 72 20 63 00 ‘ister c.’
(1660310070.960710) slcan0 TX - - 0E66327F [8] 6F 6E 66 69 67 75 72 20 'onfigur ’
(1660310071.144475) slcan0 TX - - 0E66327F [8] 61 74 69 6F 6E 20 66 00 ‘ation f.’
(1660310071.144840) slcan0 TX - - 0E66327F [8] 6F 72 20 74 65 73 74 20 'or test ’
(1660310071.144906) slcan0 TX - - 0E66327F [8] 69 6E 67 20 26 20 64 00 ‘ing & d.’
(1660310071.145008) slcan0 TX - - 0E66327F [8] 65 62 75 67 67 69 6E 20 'ebuggin ’
(1660310071.308362) slcan0 TX - - 0E66327F [8] 67 2E 0A 23 20 53 6F 00 ‘g…# So.’
(1660310071.308601) slcan0 TX - - 0E66327F [8] 75 72 63 65 20 74 68 20 'urce th ’
(1660310071.308661) slcan0 TX - - 0E66327F [8] 69 73 20 66 69 6C 65 00 ‘is file.’
(1660310071.308708) slcan0 TX - - 0E66327F [8] 20 69 6E 74 6F 20 79 20 ’ into y ’
(1660310071.472528) slcan0 TX - - 0E66327F [8] 6F 75 72 20 73 68 2F 00 ‘our sh/.’
(1660310071.472775) slcan0 TX - - 0E66327F [8] 62 61 73 68 2F 7A 73 20 'bash/zs ’
(1660310071.472833) slcan0 TX - - 0E66327F [8] 68 20 73 65 73 73 69 00 ‘h sessi.’
(1660310071.472879) slcan0 TX - - 0E66327F [8] 6F 6E 20 62 65 66 6F 20 'on befo ’
(1660310071.657497) slcan0 TX - - 0E66327F [8] 72 65 20 75 73 69 6E 00 ‘re usin.’
(1660310071.657962) slcan0 TX - - 0E66327F [8] 67 20 59 61 6B 75 74 20 'g Yakut ’
(1660310071.658147) slcan0 TX - - 0E66327F [8] 20 61 6E 64 20 6F 74 00 ’ and ot.’
(1660310071.658261) slcan0 TX - - 0E66327F [8] 68 65 72 20 43 79 70 20 'her Cyp ’
(1660310071.821583) slcan0 TX - - 0E66327F [8] 68 61 6C 20 74 6F 6F 00 ‘hal too.’
(1660310071.821847) slcan0 TX - - 0E66327F [8] 6C 73 2E 0A 23 20 59 20 'ls…# Y ’
(1660310071.821905) slcan0 TX - - 0E66327F [8] 6F 75 20 63 61 6E 20 00 ‘ou can .’
(1660310071.821957) slcan0 TX - - 0E66327F [8] 61 6C 73 6F 20 69 6E 20 'also in ’
(1660310071.960738) slcan0 TX - - 1C7D567F [8] 06 00 00 00 01 02 55 A0 ‘…U.’
(1660310071.960804) slcan0 TX - - 1C7D567F [8] 1D 56 1D 04 00 00 00 00 ‘.V…’
(1660310071.960849) slcan0 TX - - 1C7D567F [8] 01 01 55 1D 40 00 00 20 '…U.@… ’
(1660310072.041570) slcan0 TX - - 107D557F [8] 01 00 00 00 00 00 36 E1 ‘…6.’
(1660310072.170423) slcan0 TX - - 107D557F [8] 02 00 00 00 00 00 36 E2 ‘…6.’
Can you please format your post properly? It’s hard to read.
In the RX section fix this:
-if (transfer->metadata.transfer_kind == CanardTransferKindMessage) {
+if (transfer->metadata.transfer_kind == CanardTransferKindResponse) {
You are confusing messages with service transfers, they are completely different entities.
yes is CanardTransferKindMessage (I copied wrong)
It should be CanardTransferKindResponse
Beyond all with response from another application I enter correctly
Sorry, is CanardTransferKindResponse correctly.
In order:
- Create Subscription to KindResponse ReadFile
- Create Subscrition to CommandRequest
- start yakut file-server
- Receive command BeginFirmwraeUpdate with file name
- Send request with_file_name and offset=0
- receive_packet from yakut (CANDUMP) BUT NOT enter in breakpoint at KindResponse(FileRead)
- try with other STM32 that create other similar sendResponse
- Enter correctly in breakpoint
In the first message i attacked Packet with candump send from yakut and my node stm32 TX/RX ( Verify with my received packet on Serial.Print )
I don’t understand this statement. Are you saying that Yakut sends malformed responses? That is exceedingly unlikely. Can you share relevant bits of your application here for review?
→
I printed the CAN DUMP packets, if I can or should I put something else maybe if you can tell me what to put. Now I try to see the message sent by my STM32 to understand if the message is different. Other I don’t know what to do
It all looks correct. Either I am missing something or you have another problem elsewhere. Consider sharing the entirety of the source code here.
There is a difference between reponse from Yakut call and the one made with Libcanard: (3° Byte from start message)
Libcanard →
In my request at the 3rd byte there is the length of the test message 0x14 (20BYTE) 1…2…3…4…5…20
(1660312512.327015) slcan0 RX - - 1266327D [8] 00 00 14 00 00 01 02 A0 ‘…’
(1660312512.327044) slcan0 RX - - 1266327D [8] 03 04 05 06 07 08 09 00 ‘…’
(1660312512.327047) slcan0 RX - - 1266327D [8] 0A 0B 0C 0D 0E 0F 10 20 '… ’
(1660312512.327049) slcan0 RX - - 1266327D [6] 11 12 13 59 41 40 ‘…YA@’
With 255 Bytes
in 3rd place there is FF
(255BYTE) of test 1…2…3…4…5…255
(1660313243.905600) slcan0 RX - - 1266327D [8] 00 00 FF 00 00 01 02 A0
In the Yakut message at 3 Byte there is always 0 But 1 in the 4° (256 Bytes?)
(1660310070.960273) slcan0 TX - - 0E66327F [8] 00 00 00 01 23 21 2F A0 ‘…#!/.’
I receive only message from LibCanard (
in any size)
I clean the software from the temporary tests and insert it, what can I do to attach it?
I think you’re using different versions of the uavcan.file.Read service. You should be using v1.1 only, v1.0 is deprecated.
Here is the code, I confirm that with libcanard if I send I receive correctly. I made a function that increments file_read_response by 5 bytes at a time and from the master (this published) I get the message. Nothing with yakut instead. The file_read version is 1.1
See BREAK_POINT_HERE
/// This software is distributed under the terms of the MIT License.
/// Copyright (C) 2021 OpenCyphal <maintainers@opencyphal.org>
/// Author: Pavel Kirienko <pavel@opencyphal.org>
/// Revis.: Gasperini Moreno <m.gasperini@digiteco.it>
// Arduino
#include <Arduino.h>
// Libcanard
#include "register.hpp"
#include <o1heap.h>
#include <canard.h>
#include "bxcan.h"
// Namespace UAVCAN
#include <uavcan/node/Heartbeat_1_0.h>
#include <uavcan/node/GetInfo_1_0.h>
#include <uavcan/node/ExecuteCommand_1_1.h>
#include <uavcan/node/port/List_0_1.h>
#include <uavcan/_register/Access_1_0.h>
#include <uavcan/_register/List_1_0.h>
#include <uavcan/file/Read_1_1.h>
// Namespace RMAP
#include <rmap/_module/TH_1_0.h>
#include <rmap/service/_module/TH_1_0.h>
// Standard Library
#include <stdio.h>
#include <stdlib.h>
#include <assert.h>
#include <time.h>
#include <unistd.h>
// Configurazione modulo, definizioni ed utility generiche
#include "module_config.hpp"
/// We keep the state of the application here. Feel free to use static variables instead if desired.
typedef struct State
{
CanardMicrosecond started_at;
O1HeapInstance* heap;
CanardInstance canard;
CanardTxQueue canard_tx_queues[CAN_REDUNDANCY_FACTOR];
// Local File Upload Firmware name e stato...
uint8_t fw_node_id;
char fw_filename[50];
bool fw_update;
bool fw_update_loop;
uint64_t fw_next_transfer_id;
uint64_t fw_offset;
uint32_t fw_deadline_file;
bool fw_pending_file;
bool fw_timeout_file;
// Stato dei nodi remoti e servizi gestiti collegati. Possibile lettura dai registri e gestione automatica
// TODO: Vedere se fare elenco dinamico/statico con servizi_struttura statico/dinamico
// TODO: Da convertire C++ con struttura ADD Istanza in funzione di Numero Nodi presenti
struct
{
// Parametri Statici da leggere da registri o altro. Comunque inviati dal Master
// node_id è l'indirizzo nodo remoto sui cui gestire i servizi
// node_type identifica il tipo di nodo per sapere che tipologia di gestione viene effettuata
// node_port_id è il port id sul node_id remoto che risponde ai servizi relativi di request
// node_subject_id è il subject id sul node_id remoto che pubblica i dati quando attivato
uint8_t node_id;
uint8_t node_type;
CanardPortID port_id;
#ifdef USE_SUB_PUBLISH_SLAVE_DATA
CanardPortID subject_id;
#endif
// Parametri dinamici popolati durante l'esecuzione run_time (requst_id, time ecc..)
// I Transfer ID sono relativi al singolo nodo, quindi vanno tenuti separati
uint8_t node_flag; // Stato del Nodo remoto (Flag interno stati/comandi nodi)
uint32_t heartbeat_timeout; // Time heartbeat Remoto x Verifica OffLine
uint8_t heartbeat_state; // Vendor specific code NodeRemote State
uint64_t service_transfer_id; // Accesso ai dati
uint64_t command_transfer_id; // Comandi x Nodo relativo
// **** Gestione delle risposte ai comandi / richieste ****
// Puntatore alla struttura dati relativa es. -> rmap_module_TH_1_0 ecc...
// Utilizzata per il collegamento con il modulo remoto specifico
// Allocazione interna dinamica con C/C++ malloc, FreeRTOS pvPortMalloc();
void* service_module; // Dati e stato di risposta ai dati nodo
uint8_t command_response; // Stato di risposta ai comandi nodo
uint32_t command_timeout; // Time command Remoto x Verifica deadLine Request
uint32_t service_timeout; // Time getData Remoto x Verifica deadline Request
#ifdef USE_SUB_PUBLISH_SLAVE_DATA
uint16_t publisher_data_count; // Conteggio pubblicazioni remote autonome (SOLO TEST)
#endif
} remote_node[MAX_NODE_CONNECT];
// Abilitazione delle pubblicazioni falcoltative sulla rete (ON/OFF a richiesta)
struct
{
bool port_list;
} pub_enabled;
/// A transfer-ID is an integer that is incremented whenever a new message is published on a given subject.
/// It is used by the protocol for deduplication, message loss detection, and other critical things.
/// For CAN, each value can be of type uint8_t, but we use larger types for genericity and for statistical purposes,
/// as large values naturally contain the number of times each subject was published to.
struct
{
uint64_t uavcan_node_heartbeat;
uint64_t uavcan_node_port_list;
} next_transfer_id;
} State;
// Flag per Reboot del nodo.
static volatile bool g_restart_required = false;
// ***************************************************************************************************
// ********** Funzioni ed utility generiche per gestione UAVCAN **********
// ***************************************************************************************************
// Ritorna l'indice della coda master allocata in state in funzione del nodeId fisico
byte getQueueNodeFromId(State* const state, CanardNodeID nodeId) {
// Cerco la corrispondenza node_id nella coda allocata master per ritorno queueID Index
for(byte queueId=0; queueId<MAX_NODE_CONNECT; queueId++) {
// Se trovo il nodo che sta rispondeno nella coda degli allocati...
if(state->remote_node[queueId].node_id == nodeId) {
return queueId;
}
}
return GENERIC_BVAL_UNDEFINED;
}
/// A deeply embedded system should sample a microsecond-resolution non-overflowing 64-bit timer.
/// Here is a simple non-blocking implementation as an example:
/// https://github.com/PX4/sapog/blob/601f4580b71c3c4da65cc52237e62a/firmware/src/motor/realtime/motor_timer.c#L233-L274
/// Mind the difference between monotonic time and wall time. Monotonic time never changes rate or makes leaps,
/// it is therefore impossible to synchronize with an external reference. Wall time can be synchronized and therefore
/// it may change rate or make leap adjustments. The two kinds of time serve completely different purposes.
// TODO: Microsecond register STM32... Microsecond non va bene perchè si resetta mentre
// Per Cypal non dovrebbe resettarsi uint_64 Bit
static CanardMicrosecond getMonotonicMicroseconds()
{
time_t ts;
ts=(uint64_t) millis() * KILO;
return (uint64_t) ts;
}
// Ritorna unique-ID 128-bit del nodo locale. E' utilizzato in uavcan.node.GetInfo.Response e durante
// plug-and-play node-ID allocation da uavcan.pnp.NodeIDAllocationData. SerialNumber, Produttore..
// Dovrebbe essere verificato in uavcan.node.GetInfo.Response per la verifica non sia cambiato Nodo.
// Al momento vengono inseriti 2 BYTE fissi, altri eventuali, che Identificano il Tipo Modulo
static void getUniqueID(uint8_t out[uavcan_node_GetInfo_Response_1_0_unique_id_ARRAY_CAPACITY_])
{
// A real hardware node would read its unique-ID from some hardware-specific source (typically stored in ROM).
// This example is a software-only node so we store the unique-ID in a (read-only) register instead.
uavcan_register_Value_1_0 value = {0};
uavcan_register_Value_1_0_select_unstructured_(&value);
// Crea default unique_id con NODE_TYPE_MAJOR (Tipo di nodo), MINOR (Hw relativo)
// Il resto dei 128 Bit (112) vengono impostati RANDOM (potrebbero portare Manufactor, SerialNumber ecc...)
// Dovrebbe essere l'ID per la verifica incrociata del corretto Node_Id dopo il PnP
value.unstructured.value.elements[value.unstructured.value.count++] = (uint8_t) NODE_TYPE_MAJOR;
value.unstructured.value.elements[value.unstructured.value.count++] = (uint8_t) NODE_TYPE_MINOR;
for (uint8_t i = value.unstructured.value.count; i < uavcan_node_GetInfo_Response_1_0_unique_id_ARRAY_CAPACITY_; i++)
{
value.unstructured.value.elements[value.unstructured.value.count++] = (uint8_t) rand(); // NOLINT
}
registerRead("uavcan.node.unique_id", &value);
assert(uavcan_register_Value_1_0_is_unstructured_(&value) &&
value.unstructured.value.count == uavcan_node_GetInfo_Response_1_0_unique_id_ARRAY_CAPACITY_);
memcpy(&out[0], &value.unstructured.value, uavcan_node_GetInfo_Response_1_0_unique_id_ARRAY_CAPACITY_);
}
// ***********************************************************************************************
// ***********************************************************************************************
// FUNZIONI CHIAMATE DA MAIN_LOOP DI PUBBLICAZIONE E RICHIESTE DATI E SERVIZI
// ***********************************************************************************************
// ***********************************************************************************************
// ******* Funzioni ed utility di ritrasmissione dati sulla rete UAVCAN *********
// Wrapper per send e sendresponse con Canard
static void send(State* const state,
const CanardMicrosecond tx_deadline_usec,
const CanardTransferMetadata* const metadata,
const size_t payload_size,
const void* const payload)
{
for (uint8_t ifidx = 0; ifidx < CAN_REDUNDANCY_FACTOR; ifidx++)
{
(void) canardTxPush(&state->canard_tx_queues[ifidx],
&state->canard,
tx_deadline_usec,
metadata,
payload_size,
payload);
}
}
// Risposte con inversione meta.transfer_kind alle Request
static void sendResponse(State* const state,
const CanardMicrosecond tx_deadline_usec,
const CanardTransferMetadata* const request_metadata,
const size_t payload_size,
const void* const payload)
{
CanardTransferMetadata meta = *request_metadata;
meta.transfer_kind = CanardTransferKindResponse;
send(state, tx_deadline_usec, &meta, payload_size, payload);
}
// ******* FUNZIONI INVOCATE HANDLE FAST_LOOP EV. PREPARATORIE *********
// FileRead V1.1
static void handleFileRead_1_1(State* const state, const CanardMicrosecond monotonic_time)
{
// ***** Ricezione di file firmware dalla rete UAVCAN dal nodo chiamante *****
// Richiamo in continuazione rapida la funzione fino al riempimento del file
// Alla fine processo il firrmware Upload vero e proprio con i relativi check
uavcan_file_Read_Request_1_1 remotefile = {0};
remotefile.path.path.count = strlen(state->fw_filename);
memcpy(remotefile.path.path.elements, state->fw_filename, remotefile.path.path.count);
remotefile.offset = state->fw_offset;
uint8_t serialized[uavcan_file_Read_Request_1_1_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
const int8_t err = uavcan_file_Read_Request_1_1_serialize_(&remotefile, &serialized[0], &serialized_size);
assert(err >= 0);
if (err >= 0)
{
const CanardTransferMetadata meta = {
.priority = CanardPriorityHigh,
.transfer_kind = CanardTransferKindRequest,
.port_id = uavcan_file_Read_1_1_FIXED_PORT_ID_,
.remote_node_id = state->fw_node_id,
.transfer_id = (CanardTransferID) (state->fw_next_transfer_id++),
};
send(state,
monotonic_time + MEGA,
&meta,
serialized_size,
&serialized[0]);
}
}
// ******* FUNZIONI INVOCATE HANDLE 1 SECONDO EV. PREPARATORIE *********
static void handle1HzLoop(State* const state, const CanardMicrosecond monotonic_time) {
// ***** Trasmette alla rete UAVCAN lo stato haeartbeat del modulo *****
// Heartbeat Fisso anche per modulo Master (Visibile a yakut o altri tools/script gestionali)
uavcan_node_Heartbeat_1_0 heartbeat = {0};
heartbeat.uptime = (uint32_t) ((monotonic_time - state->started_at) / MEGA);
heartbeat.mode.value = uavcan_node_Mode_1_0_OPERATIONAL;
const O1HeapDiagnostics heap_diag = o1heapGetDiagnostics(state->heap);
if (heap_diag.oom_count > 0) {
heartbeat.health.value = uavcan_node_Health_1_0_CAUTION;
} else {
heartbeat.health.value = uavcan_node_Health_1_0_NOMINAL;
}
heartbeat.vendor_specific_status_code = 0;
if(state->fw_update) {
// heartbeat.mode.value = uavcan_node_Mode_1_0_SOFTWARE_UPDATE;
heartbeat.vendor_specific_status_code = 1;
}
uint8_t serialized[uavcan_node_Heartbeat_1_0_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
const int8_t err = uavcan_node_Heartbeat_1_0_serialize_(&heartbeat, &serialized[0], &serialized_size);
assert(err >= 0);
if (err >= 0)
{
const CanardTransferMetadata meta = {
.priority = CanardPriorityNominal,
.transfer_kind = CanardTransferKindMessage,
.port_id = uavcan_node_Heartbeat_1_0_FIXED_PORT_ID_,
.remote_node_id = CANARD_NODE_ID_UNSET,
.transfer_id = (CanardTransferID) (state->next_transfer_id.uavcan_node_heartbeat++),
};
send(state,
monotonic_time + MEGA,
&meta,
serialized_size,
&serialized[0]);
}
}
// ******* FUNZIONI INVOCATE HANDLE 10 SECONDI EV. PREPARATORIE *********
// Prepara lista sottoscrizioni (solo quelle allocate correttamente <= CANARD_SUBJECT_ID_MAX) uavcan_node_port_List_0_1.
static void fillSubscriptions(const CanardTreeNode* const tree, uavcan_node_port_SubjectIDList_0_1* const obj) {
if (NULL != tree) {
fillSubscriptions(tree->lr[0], obj);
const CanardRxSubscription* crs = (const CanardRxSubscription*)tree;
if (crs->port_id <= CANARD_SUBJECT_ID_MAX) {
assert(obj->sparse_list.count < uavcan_node_port_SubjectIDList_0_1_sparse_list_ARRAY_CAPACITY_);
obj->sparse_list.elements[obj->sparse_list.count++].value = crs->port_id;
fillSubscriptions(tree->lr[1], obj);
}
}
}
/// This is needed only for constructing uavcan_node_port_List_0_1.
static void fillServers(const CanardTreeNode* const tree, uavcan_node_port_ServiceIDList_0_1* const obj) {
if (NULL != tree) {
fillServers(tree->lr[0], obj);
const CanardRxSubscription* crs = (const CanardRxSubscription*)tree;
if (crs->port_id <= CANARD_SERVICE_ID_MAX) {
(void)nunavutSetBit(&obj->mask_bitpacked_[0], sizeof(obj->mask_bitpacked_), crs->port_id, true);
fillServers(tree->lr[1], obj);
}
}
}
// ************** Pubblicazione vera e propria a 10 secondi **************
static void handle01HzLoop(State* const state, const CanardMicrosecond monotonic_time)
{
// Publish the recommended (not required) port introspection message. No point publishing it if we're anonymous.
// The message is a bit heavy on the stack (about 2 KiB) but this is not a problem for a modern MCU.
// L'abilitazione del comando è facoltativa, può essere attivata/disattivata da un comando UAVCAN
if ((state->pub_enabled.port_list) &&
(state->canard.node_id <= CANARD_NODE_ID_MAX))
{
uavcan_node_port_List_0_1 m = {0};
uavcan_node_port_List_0_1_initialize_(&m);
uavcan_node_port_SubjectIDList_0_1_select_sparse_list_(&m.publishers);
uavcan_node_port_SubjectIDList_0_1_select_sparse_list_(&m.subscribers);
// Indicate which subjects we publish to. Don't forget to keep this updated if you add new publications!
{
size_t* const cnt = &m.publishers.sparse_list.count;
m.publishers.sparse_list.elements[(*cnt)++].value = uavcan_node_Heartbeat_1_0_FIXED_PORT_ID_;
m.publishers.sparse_list.elements[(*cnt)++].value = uavcan_node_port_List_0_1_FIXED_PORT_ID_;
// Aggiungo i publisher interni validi privati
}
// Indicate which servers and subscribers we implement.
// We could construct the list manually but it's easier and more robust to just query libcanard for that.
fillSubscriptions(state->canard.rx_subscriptions[CanardTransferKindMessage], &m.subscribers);
fillServers(state->canard.rx_subscriptions[CanardTransferKindRequest], &m.servers);
fillServers(state->canard.rx_subscriptions[CanardTransferKindResponse], &m.clients); // For regularity.
// Serialize and publish the message. Use a small buffer because we know that our message is always small.
// TODO: Verificare, per nulla convinto. Controllare RAM con tutti i servizi master/slave
uint8_t serialized[512] = {0}; // https://github.com/OpenCyphal/nunavut/issues/191
size_t serialized_size = uavcan_node_port_List_0_1_SERIALIZATION_BUFFER_SIZE_BYTES_;
if (uavcan_node_port_List_0_1_serialize_(&m, &serialized[0], &serialized_size) >= 0)
{
const CanardTransferMetadata meta = {
.priority = CanardPriorityOptional, // Mind the priority.
.transfer_kind = CanardTransferKindMessage,
.port_id = uavcan_node_port_List_0_1_FIXED_PORT_ID_,
.remote_node_id = CANARD_NODE_ID_UNSET,
.transfer_id = (CanardTransferID) (state->next_transfer_id.uavcan_node_port_list++),
};
// Send a 2 secondi
send(state, monotonic_time + MEGA * 2, &meta, serialized_size, &serialized[0]);
}
}
}
// ************** SEZIONE COMANDI E RICHIESTE SPECIFICHE AD UN NODO SULLA RETE **************
// ************** Invio Comando diretto ad un nodo remoto UAVCAN Cmd **************
static bool serviceSendCommand(State* const state, const CanardMicrosecond monotonic_time,
byte istanza, const uint16_t cmd_request, const void* ext_param, size_t ext_lenght)
{
// Effettua una richiesta specifica ad un nodo della rete in formato UAVCAN
uavcan_node_ExecuteCommand_Request_1_1 cmdRequest = {0};
uint8_t serialized[uavcan_node_ExecuteCommand_Request_1_1_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
// istanza -> queueId di State o istanza di nodo
// Imposta il comando da inviare
cmdRequest.command = cmd_request;
// Verifica la presenza di parametri opzionali nel comando
cmdRequest.parameter.count = ext_lenght;
// Controllo conformità lunghezza messaggio e ne copio il contenuto
assert(cmdRequest.parameter.count<=uavcan_node_ExecuteCommand_Request_1_1_parameter_ARRAY_CAPACITY_);
if (ext_lenght) {
memcpy(cmdRequest.parameter.elements, ext_param, ext_lenght);
}
// Serializzo e verifico la conformità del messaggio
const int8_t err = uavcan_node_ExecuteCommand_Request_1_1_serialize_(&cmdRequest, &serialized[0], &serialized_size);
assert(err >= 0);
if (err >= 0)
{
// Comando a priorità Immediata
const CanardTransferMetadata meta = {
.priority = CanardPriorityHigh,
.transfer_kind = CanardTransferKindRequest,
.port_id = uavcan_node_ExecuteCommand_1_1_FIXED_PORT_ID_,
.remote_node_id = state->remote_node[istanza].node_id,
.transfer_id = (CanardTransferID) (state->remote_node[istanza].command_transfer_id++),
};
send(state,
monotonic_time + MEGA,
&meta,
serialized_size,
&serialized[0]);
return true;
}
return false;
}
// ************** Invio richiesta dati diretto ad un nodo remoto UAVCAN Get **************
static bool serviceSendRequestData(State* const state, const CanardMicrosecond monotonic_time,
byte istanza, byte comando, uint16_t run_sectime)
{
// Effettua una richiesta specifica ad un nodo della rete in formato UAVCAN
// La richiesta è generica per tutti i moduli (univoca DSDL), comunque parte integrante di ogni
// DSDL singola di modulo. Il PORT_ID fisso o dinamico indica il nodo remoto.
// L'interpretazione è invece tipicizzata dalla risposta (DSDL specifica)
rmap_service_setmode_1_0 cmdRequest = {0};
uint8_t serialized[rmap_service_module_TH_Request_1_0_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
// Imposta il comando da inviare ed il timer base
cmdRequest.comando = comando;
cmdRequest.run_sectime = run_sectime;
// Serializzo e verifico la conformità del messaggio
const int8_t err = rmap_service_setmode_1_0_serialize_(&cmdRequest, &serialized[0], &serialized_size);
assert(err >= 0);
if (err >= 0)
{
// Comando a priorità Immediata
const CanardTransferMetadata meta = {
.priority = CanardPriorityHigh,
.transfer_kind = CanardTransferKindRequest,
.port_id = state->remote_node[istanza].port_id,
.remote_node_id = state->remote_node[istanza].node_id,
.transfer_id = (CanardTransferID) (state->remote_node[istanza].command_transfer_id++),
};
send(state,
monotonic_time + MEGA,
&meta,
serialized_size,
&serialized[0]);
return true;
}
return false;
}
// ***************************************************************************************************
// Funzioni ed utility di ricezione dati dalla rete UAVCAN, richiamati da processReceivedTransfer()
// ***************************************************************************************************
// Chiamate gestioni RPC remote da master (yakut o altro servizio di controllo)
static uavcan_node_ExecuteCommand_Response_1_1 processRequestExecuteCommand(State* state, const uavcan_node_ExecuteCommand_Request_1_1* req,
uint8_t remote_node)
{
uavcan_node_ExecuteCommand_Response_1_1 resp = {0};
// req->command (Comando esterno ricevuto 2 BYTES RESERVED FFFF-FFFA)
// Gli altri sono liberi per utilizzo interno applicativo con #define interne
// req->parameter (array di byte MAX 255 per i parametri da request)
// Risposta attuale (resp) 1 Bytes RESERVER (0..6) gli altri #define interne
switch (req->command)
{
case uavcan_node_ExecuteCommand_Request_1_1_COMMAND_BEGIN_SOFTWARE_UPDATE:
{
state->fw_node_id = remote_node;
// Copio la stringa nell name file state->fw_filename
memcpy(state->fw_filename, req->parameter.elements, req->parameter.count);
state->fw_filename[req->parameter.count] = '\0';
Serial.print(F("Firmware update request from node id: "));
Serial.println(state->fw_node_id);
Serial.print(F("Filename to download: "));
Serial.println(state->fw_filename);
state->fw_update = true;
// Reset Offset Read File to Init
state->fw_offset = 0;
// Avvio la funzione con OK
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_SUCCESS;
break;
}
case uavcan_node_ExecuteCommand_Request_1_1_COMMAND_FACTORY_RESET:
{
registerDoFactoryReset();
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_SUCCESS;
break;
}
case uavcan_node_ExecuteCommand_Request_1_1_COMMAND_RESTART:
{
g_restart_required = true;
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_SUCCESS;
break;
}
case uavcan_node_ExecuteCommand_Request_1_1_COMMAND_STORE_PERSISTENT_STATES:
{
// If your registers are not automatically synchronized with the non-volatile storage, use this command
// to commit them to the storage explicitly. Otherwise it is safe to remove it.
// In this demo, the registers are stored in files, so there is nothing to do.
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_SUCCESS;
break;
}
case CMD_ENABLE_PUBLISH_PORT_LIST:
{
// Abilita pubblicazione slow_loop elenco porte (Cypal facoltativo)
state->pub_enabled.port_list = true;
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_SUCCESS;
break;
}
case CMD_DISABLE_PUBLISH_PORT_LIST:
{
// Disabilita pubblicazione slow_loop elenco porte (Cypal facoltativo)
state->pub_enabled.port_list = false;
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_SUCCESS;
break;
}
default:
{
resp.status = uavcan_node_ExecuteCommand_Response_1_1_STATUS_BAD_COMMAND;
break;
}
}
return resp;
}
// Accesso ai registri UAVCAN risposta a richieste
static uavcan_register_Access_Response_1_0 processRequestRegisterAccess(const uavcan_register_Access_Request_1_0* req)
{
char name[uavcan_register_Name_1_0_name_ARRAY_CAPACITY_ + 1] = {0};
assert(req->name.name.count < sizeof(name));
memcpy(&name[0], req->name.name.elements, req->name.name.count);
name[req->name.name.count] = '\0';
uavcan_register_Access_Response_1_0 resp = {0};
// If we're asked to write a new value, do it now:
if (!uavcan_register_Value_1_0_is_empty_(&req->value))
{
uavcan_register_Value_1_0_select_empty_(&resp.value);
registerRead(&name[0], &resp.value);
// If such register exists and it can be assigned from the request value:
if (!uavcan_register_Value_1_0_is_empty_(&resp.value) && registerAssign(&resp.value, &req->value))
{
registerWrite(&name[0], &resp.value);
}
}
// Regardless of whether we've just wrote a value or not, we need to read the current one and return it.
// The client will determine if the write was successful or not by comparing the request value with response.
uavcan_register_Value_1_0_select_empty_(&resp.value);
registerRead(&name[0], &resp.value);
// Currently, all registers we implement are mutable and persistent. This is an acceptable simplification,
// but more advanced implementations will need to differentiate between them to support advanced features like
// exposing internal states via registers, perfcounters, etc.
resp._mutable = true;
resp.persistent = true;
// Our node does not synchronize its time with the network so we can't populate the timestamp.
resp.timestamp.microsecond = uavcan_time_SynchronizedTimestamp_1_0_UNKNOWN;
return resp;
}
// Risposta a uavcan.node.GetInfo which Info Node (nome, versione, uniqueID di verifica ecc...)
static uavcan_node_GetInfo_Response_1_0 processRequestNodeGetInfo()
{
uavcan_node_GetInfo_Response_1_0 resp = {0};
resp.protocol_version.major = CANARD_CYPHAL_SPECIFICATION_VERSION_MAJOR;
resp.protocol_version.minor = CANARD_CYPHAL_SPECIFICATION_VERSION_MINOR;
// The hardware version is not populated in this demo because it runs on no specific hardware.
// An embedded node would usually determine the version by querying the hardware.
resp.software_version.major = VERSION_MAJOR;
resp.software_version.minor = VERSION_MINOR;
resp.software_vcs_revision_id = VCS_REVISION_ID;
getUniqueID(resp.unique_id);
// The node name is the name of the product like a reversed Internet domain name (or like a Java package).
resp.name.count = strlen(NODE_NAME);
memcpy(&resp.name.elements, NODE_NAME, resp.name.count);
// The software image CRC and the Certificate of Authenticity are optional so not populated in this demo.
return resp;
}
// ******************************************************************************************
// Processo multiplo di ricezione messaggi e comandi. Gestione entrata ed uscita dei messaggi
// Chiamata direttamente nel main loop in ricezione dalla coda RX
// Richiama le funzioni qui sopra di preparazione e risposta alle richieste
// ******************************************************************************************
static void processReceivedTransfer(State* const state, const CanardRxTransfer* const transfer)
{
// Gestione dei Messaggi in ingresso
if (transfer->metadata.transfer_kind == CanardTransferKindMessage)
{
// bool Per assert mancanza handler di eventuale servizio sottoscritto
bool bKindMessageProcessed = false;
// Gestione dei messaggi Heartbeat per stato rete (gestisco come master)
if (transfer->metadata.port_id == uavcan_node_Heartbeat_1_0_FIXED_PORT_ID_)
{
bKindMessageProcessed = true;
size_t size = transfer->payload_size;
uavcan_node_Heartbeat_1_0 msg = {0};
if (uavcan_node_Heartbeat_1_0_deserialize_(&msg, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
Serial.print(F("RX HeartBeat from -> "));
Serial.println(transfer->metadata.remote_node_id);
// Processo e registro il nodo: stato, OnLine e relativi flag
byte queueId = getQueueNodeFromId(state, transfer->metadata.remote_node_id);
// Se nodo correttamente allocato e gestito (potrebbe esser Yakut non registrato)
if (queueId != GENERIC_BVAL_UNDEFINED) {
// Accodo i dati letti dal messaggio
SetNodeOnline(state->remote_node[queueId].node_flag);
SetNodeWarningState(state->remote_node[queueId].node_flag, msg.health.value);
state->remote_node[queueId].heartbeat_state = msg.vendor_specific_status_code;
// Set internal local millis per controllo NodoOffline
state->remote_node[queueId].heartbeat_timeout = millis();
}
}
}
#ifdef USE_SUB_PUBLISH_SLAVE_DATA
else
{
// Gestione messaggi pubblicazione dati dei moduli slave (gestisco come master)
// Es. popalamento dati se attivato un log specifico o show valori su display
// Il comando è opzionale perchè in request/response esiste già questa possibilità
// Nodo rispondente leggo dalla coda la/le pubblicazioni attivate (MAX 1 x tipologia)
byte queueId = getQueueNodeFromId(state, transfer->metadata.remote_node_id);
// Se nodo correttammente allocato e gestito
if (queueId != GENERIC_BVAL_UNDEFINED) {
// Verifico se risposta del servizio corrisponde al chiamante (eventuali + servizi sotto...)
// Gestione di tutti i servizi possibili allocabili, valido per tutti i nodi
if (transfer->metadata.port_id == state->remote_node[queueId].subject_id)
{
// ************* Service Modulo TH Response *************
if(state->remote_node[queueId].node_type == MODULE_TYPE_TH) {
// Processato il messaggio con il relativo Handler. OK
bKindMessageProcessed = true;
// Modulo TH, leggo e deserializzo il messaggio in ingresso
rmap_module_TH_1_0 msg = {0};
size_t size = transfer->payload_size;
if (rmap_module_TH_1_0_deserialize_(&msg, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
// TODO: vedere con Marco Pubblica, registra elimina, display... altro
// Per ora salvo solo il dato ricevuto dalla struttura di state msg (count)
// msg contiene i dati di blocco pubblicati
state->remote_node[queueId].publisher_data_count++;
}
}
// ALTRI MODULI DA INSERIRE QUA... PG, VV, RS, GAS ECC...
}
}
}
#endif
// Mancanza di handler per un servizio sottoscritto
if (!bKindMessageProcessed)
{
// Gestione di un messaggio sottoscritto senza gestione. Se arrivo quà è un errore di sviluppo
assert(false);
}
}
// Gestione delle richieste esterne
else if (transfer->metadata.transfer_kind == CanardTransferKindRequest)
{
if (transfer->metadata.port_id == uavcan_node_GetInfo_1_0_FIXED_PORT_ID_)
{
// The request object is empty so we don't bother deserializing it. Just send the response.
const uavcan_node_GetInfo_Response_1_0 resp = processRequestNodeGetInfo();
uint8_t serialized[uavcan_node_GetInfo_Response_1_0_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
const int8_t res = uavcan_node_GetInfo_Response_1_0_serialize_(&resp, &serialized[0], &serialized_size);
if (res >= 0)
{
sendResponse(state,
transfer->timestamp_usec + MEGA,
&transfer->metadata,
serialized_size,
&serialized[0]);
}
}
else if (transfer->metadata.port_id == uavcan_register_Access_1_0_FIXED_PORT_ID_)
{
uavcan_register_Access_Request_1_0 req = {0};
size_t size = transfer->payload_size;
if (uavcan_register_Access_Request_1_0_deserialize_(&req, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
const uavcan_register_Access_Response_1_0 resp = processRequestRegisterAccess(&req);
uint8_t serialized[uavcan_register_Access_Response_1_0_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
if (uavcan_register_Access_Response_1_0_serialize_(&resp, &serialized[0], &serialized_size) >= 0)
{
sendResponse(state,
transfer->timestamp_usec + MEGA,
&transfer->metadata,
serialized_size,
&serialized[0]);
}
}
}
else if (transfer->metadata.port_id == uavcan_register_List_1_0_FIXED_PORT_ID_)
{
uavcan_register_List_Request_1_0 req = {0};
size_t size = transfer->payload_size;
if (uavcan_register_List_Request_1_0_deserialize_(&req, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
const uavcan_register_List_Response_1_0 resp = {.name = registerGetNameByIndex(req.index)};
uint8_t serialized[uavcan_register_List_Response_1_0_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
if (uavcan_register_List_Response_1_0_serialize_(&resp, &serialized[0], &serialized_size) >= 0)
{
sendResponse(state,
transfer->timestamp_usec + MEGA,
&transfer->metadata,
serialized_size,
&serialized[0]);
}
}
}
else if (transfer->metadata.port_id == uavcan_node_ExecuteCommand_1_1_FIXED_PORT_ID_)
{
uavcan_node_ExecuteCommand_Request_1_1 req = {0};
size_t size = transfer->payload_size;
if (uavcan_node_ExecuteCommand_Request_1_1_deserialize_(&req, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
const uavcan_node_ExecuteCommand_Response_1_1 resp = processRequestExecuteCommand(state, &req, transfer->metadata.remote_node_id);
uint8_t serialized[uavcan_node_ExecuteCommand_Response_1_1_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
size_t serialized_size = sizeof(serialized);
if (uavcan_node_ExecuteCommand_Response_1_1_serialize_(&resp, &serialized[0], &serialized_size) >= 0)
{
sendResponse(state,
transfer->timestamp_usec + MEGA,
&transfer->metadata,
serialized_size,
&serialized[0]);
}
}
}
else
{
// Gestione di una richiesta senza controllore locale. Se arrivo quà è un errore di sviluppo
assert(false);
}
}
// Gestione delle risposte alle richeste inviate alla rete come Master
else if (transfer->metadata.transfer_kind == CanardTransferKindResponse)
{
// Comando inviato ad un nodo remoto, verifica della risposta e della coerenza messaggio
if (transfer->metadata.port_id == uavcan_node_ExecuteCommand_1_1_FIXED_PORT_ID_)
{
uavcan_node_ExecuteCommand_Response_1_1 resp = {0};
size_t size = transfer->payload_size;
if (uavcan_node_ExecuteCommand_Response_1_1_deserialize_(&resp, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
// Ricerco idNodo nella coda degli allocati del master
// Copio la risposta ricevuta nella struttura relativa e resetto il flag pending
byte queueId = getQueueNodeFromId(state, transfer->metadata.remote_node_id);
if (queueId != GENERIC_BVAL_UNDEFINED) {
// Resetta il pending del comando del nodo verificato
ResetNodePendingCmd(state->remote_node[queueId].node_flag);
// Copia la risposta nella variabile di chiamata in state
state->remote_node[queueId].command_response = resp.status;
}
}
}
// else if -> servizi opzionali di risposta vanno inseriti qui
// else if (transfer->metadata.port_id == uavcan_file_Read_1_0_FIXED_PORT_ID_)
// {
// uavcan_file_Read_Response_1_0 resp = {0};
// size_t size = transfer->payload_size;
// if (uavcan_file_Read_Response_1_0_deserialize_(&resp, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
// {
// // Reset pending command
// state->fw_pending_file = false;
// // TODO: Gestire messaggio in req, save struct continuos...
// // Decodifica e salvataggio del file... SD o Blocchi Flash...
// // Gestire risposta... per ora sempre OK poi verifica con errori in test
// // uavcan_file_Write_Response_1_1 resp; // = processRequestReadFile(state, &req);
// // uint8_t serialized[uavcan_file_Write_Response_1_1_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
// // size_t serialized_size = sizeof(serialized);
// // Data OK
// // Only for test
// state->fw_update_loop++;
// }
// }
else if (transfer->metadata.port_id == uavcan_file_Read_1_1_FIXED_PORT_ID_)
{
// BREAK_POINT_HERE
uavcan_file_Read_Response_1_1 resp = {0};
size_t size = transfer->payload_size;
if (uavcan_file_Read_Response_1_1_deserialize_(&resp, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
// Reset pending command
state->fw_pending_file = false;
Serial.print(F("RX FILE READ BLOCK LEN: "));
Serial.println(resp.data.value.count);
// TODO: Gestire messaggio in req, save struct continuos...
// Decodifica e salvataggio del file... SD o Blocchi Flash...
// Gestire risposta... per ora sempre OK poi verifica con errori in test
// uavcan_file_Write_Response_1_1 resp; // = processRequestReadFile(state, &req);
// uint8_t serialized[uavcan_file_Write_Response_1_1_SERIALIZATION_BUFFER_SIZE_BYTES_] = {0};
// size_t serialized_size = sizeof(serialized);
// Data OK
// Only for test
state->fw_update_loop++;
}
}
// Risposta ad un servizio (dati) dinamicamente allocato... ( deve essere ultimo else )
// Servizio di risposta alla richiesta su modulo slave, verifica della risposta e della coerenza messaggio
// Per il nodo che risponde verifico i servizi attivi per la corrispondenza dinamica risposta
else
{
// Nodo rispondente (posso avere senza problemi più servizi con stesso port_id su diversi nodi)
byte queueId = getQueueNodeFromId(state, transfer->metadata.remote_node_id);
// Se nodo correttammente allocato e gestito
if (queueId != GENERIC_BVAL_UNDEFINED) {
// Verifico se risposta del servizio corrisponde al chiamante (eventuali + servizi sotto...)
// Gestione di tutti i servizi possibili allocabili, valido per tutti i nodi
if (transfer->metadata.port_id == state->remote_node[queueId].port_id)
{
// ************* Service Modulo TH Response *************
if(state->remote_node[queueId].node_type == MODULE_TYPE_TH) {
// Modulo TH, leggo e deserializzo il messaggio in ingresso
rmap_service_module_TH_Response_1_0 resp = {0};
size_t size = transfer->payload_size;
if (rmap_service_module_TH_Response_1_0_deserialize_(&resp, static_cast<uint8_t const*>(transfer->payload), &size) >= 0)
{
// Resetta il pending del comando del nodo verificato
ResetNodePendingData(state->remote_node[queueId].node_flag);
// Copia la risposta nella variabile di chiamata in state
// Oppure gestire qua tutte le altre occorrenze per stima V4
// TODO: vedere con Marco Pubblica, registra elimina, display... altro
// Per ora copio in una struttura di state response
memcpy(state->remote_node[queueId].service_module, &resp, sizeof(resp));
}
}
// ALTRI MODULI DA INSERIRE QUA... PG, VV, RS, GAS ECC...
}
}
}
}
else
{
// Se arrivo quà è un errore di sviluppo, controllare setup sottoscrizioni, risposte e messaggi
assert(false);
}
}
// *********************************************************************************************
// Inizializzazione generale HW, canard, CAN_BUS, e dispositivi collegati
// *********************************************************************************************
// Setup SW - Canard memory access (allocate/free)
static void* canardAllocate(CanardInstance* const ins, const size_t amount)
{
O1HeapInstance* const heap = ((State*) ins->user_reference)->heap;
assert(o1heapDoInvariantsHold(heap));
return o1heapAllocate(heap, amount);
}
static void canardFree(CanardInstance* const ins, void* const pointer)
{
O1HeapInstance* const heap = ((State*) ins->user_reference)->heap;
o1heapFree(heap, pointer);
}
// Setup HW (PIN, interface, filter, baud)
bool CAN_HW_Init(void)
{
// Definition CAN structure variable
CAN_HandleTypeDef CAN_Handle;
// Definition GPIO and CAN filter structure variables
GPIO_InitTypeDef GPIO_InitStruct;
CAN_FilterTypeDef CAN_FilterInitStruct;
// GPIO Ports clock enable
__HAL_RCC_GPIOA_CLK_ENABLE();
// CAN1 clock enable
__HAL_RCC_CAN1_CLK_ENABLE();
#if defined(STM32L452xx)
// Mapping GPIO for CAN
/* Configure CAN pin: RX */
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* Configure CAN pin: TX */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
#else
#error "Warning untested processor variant"
#endif
// Setup CAN Istance Basic
CAN_Handle.Instance = CAN1;
CAN_Handle.Init.Mode = CAN_MODE_NORMAL;
CAN_Handle.Init.TimeTriggeredMode = DISABLE;
CAN_Handle.Init.AutoBusOff = DISABLE;
CAN_Handle.Init.AutoWakeUp = DISABLE;
CAN_Handle.Init.AutoRetransmission = DISABLE;
CAN_Handle.Init.ReceiveFifoLocked = DISABLE;
CAN_Handle.Init.TransmitFifoPriority = DISABLE;
// Check error initialization CAN
if (HAL_CAN_Init(&CAN_Handle) != HAL_OK) {
Serial.println(F("Error initialization HW CAN base"));
assert(false);
return false;
}
// CAN filter basic initialization
CAN_FilterInitStruct.FilterIdHigh = 0x0000;
CAN_FilterInitStruct.FilterIdLow = 0x0000;
CAN_FilterInitStruct.FilterMaskIdHigh = 0x0000;
CAN_FilterInitStruct.FilterMaskIdLow = 0x0000;
CAN_FilterInitStruct.FilterFIFOAssignment = 0;
CAN_FilterInitStruct.FilterBank = 0;
CAN_FilterInitStruct.FilterMode = CAN_FILTERMODE_IDMASK;
CAN_FilterInitStruct.FilterScale = CAN_FILTERSCALE_32BIT;
CAN_FilterInitStruct.FilterActivation = ENABLE;
// Check error initalization CAN filter
if (HAL_CAN_ConfigFilter(&CAN_Handle, &CAN_FilterInitStruct) != HAL_OK) {
Serial.println(F("Error initialization filter CAN base"));
assert(false);
return false;
}
// SetUp Speed to CAN_BIT_RATE (defined)
BxCANTimings timings;
bool result = bxCANComputeTimings(HAL_RCC_GetPCLK1Freq(), CAN_BIT_RATE, &timings);
if (!result) {
Serial.println(F("Error initialization bxCANComputeTimings"));
assert(false);
return false;
}
// Attivazione bxCAN sulle interfacce richieste, velocità e modalità
result = bxCANConfigure(0, timings, false);
if (!result) {
Serial.println(F("Error initialization bxCANConfigure"));
assert(false);
return false;
}
// Check error starting CAN
if (HAL_CAN_Start(&CAN_Handle) != HAL_OK) {
Serial.println(F("CAN startup ERROR!!!"));
assert(false);
return false;
}
// Setup Completato
return true;
}
// *********************************************************************************************
// SETUP AMBIENTE
// *********************************************************************************************
void setup(void) {
// *****************************************************
// STARTUP SERIAL-COMMUNICATION
// *****************************************************
Serial.begin(115200);
// Wait for serial port to connect
while (!Serial) {
}
Serial.println(F("Start RS232 Monitor"));
// *****************************************************
// STARTUP LED E PIN DIAGNOSTICI
// *****************************************************
// Output mode for LED BLINK SW LOOP
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
// *****************************************************
// STARTUP LIBRERIA SD/MEM REGISTER COLLEGATA
// *****************************************************
if (!setupSd(PIN_SPI_MOSI, PIN_SPI_MISO, PIN_SPI_SCK, PIN_SPI_SS, 18)) {
Serial.println(F("Initialization SD card error"));
assert(false);
}
Serial.println(F("Initialization SD card done"));
// *****************************************************
// STARTUP CANBUS
// *****************************************************
Serial.print(F("Initializing CANBUS..., PCLK1 Clock Freq: "));
Serial.println(HAL_RCC_GetPCLK1Freq());
if (!CAN_HW_Init()) {
Serial.println(F("Initialization CAN BUS error"));
assert(false);
}
Serial.println(F("Initialization CAN BUS done"));
}
// *************************************************************************************************
// MAIN LOOP
// *************************************************************************************************
void loop(void)
{
uavcan_register_Value_1_0 val = {0};
State state = {0};
// A simple node like this one typically does not require more than 8 KiB of heap and 4 KiB of stack.
// For the background and related theory refer to the following resources:
// - https://github.com/OpenCyphal/libcanard/blob/master/README.md
// - https://github.com/pavel-kirienko/o1heap/blob/master/README.md
// - https://forum.opencyphal.org/t/uavcanv1-libcanard-nunavut-templates-memory-usage-concerns/1118/4
_Alignas(O1HEAP_ALIGNMENT) static uint8_t heap_arena[1024 * 16] = {0};
state.heap = o1heapInit(heap_arena, sizeof(heap_arena));
assert(NULL != state.heap);
// The libcanard instance requires the allocator for managing protocol states.
state.canard = canardInit(&canardAllocate, &canardFree);
state.canard.user_reference = &state; // Make the state reachable from the canard instance.
// Default Setup servizi attivi nel modulo
state.pub_enabled.port_list = DEFAULT_PUBLISH_PORT_LIST;
// ********************************************************************************
// INIT VALUE
// ********************************************************************************
// Reset Remote node_id per ogni nodo collegato. Solo i nodi validi verranno gestiti
for(uint8_t iCnt = 0; iCnt<MAX_NODE_CONNECT; iCnt++) {
state.remote_node[iCnt].node_id = CANARD_NODE_ID_UNSET;
state.remote_node[iCnt].node_flag = 0;
state.remote_node[iCnt].heartbeat_timeout = 0;
state.remote_node[iCnt].command_timeout = 0;
state.remote_node[iCnt].service_timeout = 0;
state.remote_node[iCnt].service_transfer_id = 0;
state.remote_node[iCnt].command_transfer_id = 0;
state.remote_node[iCnt].port_id = UINT16_MAX;
state.remote_node[iCnt].service_module = NULL;
#ifdef USE_SUB_PUBLISH_SLAVE_DATA
state.remote_node[iCnt].subject_id = UINT16_MAX;
state.remote_node[iCnt].publisher_data_count = 0;
#endif
}
// Canard Master NODE ID Fixed dal defined value in module_config
state.canard.node_id = (CanardNodeID) NODE_MASTER_ID;
// ********************************************************************************
// READING PARAM FROM E2 MEMORY / FLASH / SDCARD
// ********************************************************************************
// TODO:
// Read Config Remote Node x Lettura porte e servizi. Non utilizzo registri ma CFG Generale
// Vedere poi se meglio utilizzare i registri o anche solo per porzioni di configurazione
// Fixed Value adesso !!!
state.remote_node[0].node_id = 125;
state.remote_node[0].node_type = MODULE_TYPE_TH;
state.remote_node[0].port_id = 100;
#ifdef USE_SUB_PUBLISH_SLAVE_DATA
// state.remote_node[0].node_subject_id = 5678;
#endif
state.remote_node[0].service_module = malloc(sizeof(rmap_service_module_TH_Response_1_0));
// ********************************************************************************
// FIXED REGISTER_INIT, FARE INIT OPZIONALE x REGISTRI FISSI ECC. E/O INVAR.
// ********************************************************************************
#ifdef INIT_REGISTER
// Opzionale Salvataggio veloce dei registri utili Stima V4
#endif
// Inizializza i registri nella modalità utilizzata (prepare SD/FLASH/ROM con default Value)
registerInit();
// ********* Lettura Registri standard UAVCAN *********
// The description register is optional but recommended because it helps constructing/maintaining large networks.
// It simply keeps a human-readable description of the node that should be empty by default.
uavcan_register_Value_1_0_select_string_(&val);
val._string.value.count = 0;
registerRead("uavcan.node.description", &val); // We don't need the value, we just need to ensure it exists.
// Configure il trasporto dal registro standard uavcan. Default a CANARD_MTU_MAX
// Inserito per compatibilità, attualmente non gestita la modifica mtu_bytes (FISSA A MTU_CLASSIC)
uavcan_register_Value_1_0_select_natural16_(&val);
val.natural16.value.count = 1;
val.natural16.value.elements[0] = CANARD_MTU_MAX;
registerRead("uavcan.can.mtu", &val);
assert(uavcan_register_Value_1_0_is_natural16_(&val) && (val.natural16.value.count == 1));
for (uint8_t ifidx = 0; ifidx < CAN_REDUNDANCY_FACTOR; ifidx++)
{
state.canard_tx_queues[ifidx] = canardTxInit(CAN_TX_QUEUE_CAPACITY, val.natural16.value.elements[0]);
}
// We also need the bitrate configuration register. In this demo we can't really use it but an embedded application
// should define "uavcan.can.bitrate" of type natural32[2]; the second value is 0/ignored if CAN FD not supported.
// TODO: Default a CAN_BIT_RATE, se CAN_BIT_RATE <> readRegister setup bxCAN con nuovo RATE hot reload
uavcan_register_Value_1_0_select_natural32_(&val);
val.natural32.value.count = 2;
val.natural32.value.elements[0] = CAN_BIT_RATE;
val.natural32.value.elements[1] = 0ul; // Ignored for CANARD_MTU_CAN_CLASSIC
registerRead("uavcan.can.bitrate", &val);
assert(uavcan_register_Value_1_0_is_natural32_(&val) && (val.natural32.value.count == 2));
// TODO: (Controlla per MTU, CAN_FD non supportato, gestire solo il BitRate, mantenere per compatibilità futura)
// Se BIT_RATE o MTU <> da valori standard, devo reinizializzare bxCanTimings e
// ********************************************************************************
// AVVIA SOTTOSCRIZIONI ai messaggi per servizi RPC ecc...
// ********************************************************************************
// Service servers: -> Risposta per GetNodeInfo richiesta esterna (Yakut, Altri)
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindRequest,
uavcan_node_GetInfo_1_0_FIXED_PORT_ID_,
uavcan_node_GetInfo_Request_1_0_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// Service servers: -> Chiamata per ExecuteCommand richiesta esterna (Yakut, Altri)
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindRequest,
uavcan_node_ExecuteCommand_1_1_FIXED_PORT_ID_,
uavcan_node_ExecuteCommand_Request_1_1_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// Service servers: -> Risposta per Accesso ai registri richiesta esterna (Yakut, Altri)
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindRequest,
uavcan_register_Access_1_0_FIXED_PORT_ID_,
uavcan_register_Access_Request_1_0_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// Service servers: -> Risposta per Lista dei registri richiesta esterna (Yakut, Altri)
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindRequest,
uavcan_register_List_1_0_FIXED_PORT_ID_,
uavcan_register_List_Request_1_0_EXTENT_BYTES_,
CANARD_REGISTERLIST_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// ******* SOTTOSCRIZIONE MESSAGGI / COMANDI E SERVIZI AD UTILITA' MASTER ********
// Messaggi HEARTBEAT: -> Verifica della presenza per stato Nodi (Slave) OnLine / OffLine
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindMessage,
uavcan_node_Heartbeat_1_0_FIXED_PORT_ID_,
uavcan_node_Heartbeat_1_0_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// Service client: -> Risposta per ExecuteCommand richiesta interna (come master)
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindResponse,
uavcan_node_ExecuteCommand_1_1_FIXED_PORT_ID_,
uavcan_node_ExecuteCommand_Response_1_1_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// **************************** FILE ****************************
// Service client: -> Risposta per Read (Receive) File local richiesta esterna (Yakut, Altri)
{
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindResponse,
uavcan_file_Read_1_1_FIXED_PORT_ID_,
uavcan_file_Read_Response_1_1_EXTENT_BYTES_,
CANARD_READFILE_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
// Allocazione dinamica delle subscription servizi request/response e pubblicazioni dei nodi remoti
// in funzione delle registrazioni/istanze utilizzate nel master
// Ogni subject utuilizzato per ogni nodo slave deve avere una sottoscrizione propria
// Solo una sottoscrizione è possibile per singolo servizio per relativo port_id (dynamic o fixed)
// La gestione di servizi con stesso port_id è assolutamente possibile e correttamente gestita
// nel software. Basta solamente a livello server registrare lo stesso port_id per servizio.
// La funzionailtà cosi impostata consente uno o più port_id x servizio senza problemi
// Eventuali errori di allocazione possono eventualmente essere rilevati ma non ci sono problemi
// sw in quanto una sottoscrizione chiamata in coda elimina una precedente (con stesso port o subjcect)
for(byte queueId=0; queueId<MAX_NODE_CONNECT; queueId++) {
// ************* SERVICE *************
// Se previsto il servizio request/response con port_id valido
if ((state.remote_node[queueId].service_module) &&
(state.remote_node[queueId].port_id <= CANARD_SERVICE_ID_MAX)) {
// Controllo le varie tipologie di request/service per il nodo
if(state.remote_node[queueId].node_type == MODULE_TYPE_TH) {
// Alloco la stottoscrizione in funzione del tipo di modulo
// Service client: -> Risposta per ServiceDataModuleTH richiesta interna (come master)
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindResponse,
state.remote_node[queueId].port_id,
rmap_service_module_TH_Response_1_0_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
}
#ifdef USE_SUB_PUBLISH_SLAVE_DATA
// ************* PUBLISH *************
// Se previsto il servizio publisher (subject_id valido)
// Non alloco niente per il publish (gestione esempio display o altro debug interno da gestire)
if (state.remote_node[queueId].subject_id <= CANARD_SUBJECT_ID_MAX) {
// Controllo le varie tipologie di request/service per il nodo
if(state.remote_node[queueId].node_type == MODULE_TYPE_TH) {
// Alloco la stottoscrizione in funzione del tipo di modulo
// Service client: -> Sottoscrizione per ModuleTH (come master)
static CanardRxSubscription rx;
const int8_t res = //
canardRxSubscribe(&state.canard,
CanardTransferKindMessage,
state.remote_node[queueId].subject_id,
rmap_module_TH_1_0_EXTENT_BYTES_,
CANARD_DEFAULT_TRANSFER_ID_TIMEOUT_USEC,
&rx);
if (res < 0) NVIC_SystemReset();
}
}
#endif
}
// ********************************************************************************
// AVVIA LOOP CANARD PRINCIPALE gestione TX/RX Code -> Messaggi
// ********************************************************************************
// TODO: Eliminare
digitalWrite(LED_BUILTIN, LOW);
bool ledShow;
int bTxAttempt = 0;
int bRxAttempt = 0;
long checkTimeout = 0;
long lastMillis;
bool bEnabService = false;
bool bLastPendingCmd = false;
bool bIsPendingCmd = false;
bool bLastPendingData = false;
bool bIsPendingData = false;
bool bIsResetFaultCmd = false;
int bRxLastAttempt = 0;
// Stampe locali TODO: utilizzare il metodo di Paolo
// #define LOG_TX_RX_ATTEMPT
// #define PUBLISH_HEARTBEAT
// #define PUBLISH_PORTLIST
// #define TEST_COMMAND
// #define TEST_DATA
#define LOG_RX_PACKET
// Set START Timetable LOOP RX/TX.
state.started_at = getMonotonicMicroseconds();
const CanardMicrosecond fast_loop_period = MEGA / 3;
CanardMicrosecond next_333_ms_iter_at = state.started_at + fast_loop_period;
CanardMicrosecond next_01_sec_iter_at = state.started_at + MEGA;
CanardMicrosecond next_20_sec_iter_at = state.started_at + MEGA * 1.5;
CanardMicrosecond test_cmd_cs_iter_at = state.started_at + MEGA * 2.5;
CanardMicrosecond test_cmd_vs_iter_at = state.started_at + MEGA * 3.5;
do
{
// Run a trivial scheduler polling the loops that run the business logic.
CanardMicrosecond monotonic_time = getMonotonicMicroseconds();
// monotonic_time.
// ************************************************************************
// *************** CHECK OFFLINE/DEADLINE COMMAND/STATE ***************
// ************************************************************************
// TEST Check ogni 10 mSec circa ( SOLO TEST COMANDI DA INSERIRE IN TASK )
if ((millis()-checkTimeout)>=10)
{
// Deadline di controllo
// Mancata risposta, nodo in Errore o Full o CanardHeapError ecc...
checkTimeout = millis();
// *********************************************************
// Per il nodo locale SERVER
// *********************************************************
// Controllo TimeOut Comando file su modulo remoto
if(state.fw_pending_file) {
if((checkTimeout - state.fw_deadline_file) > NODE_GETFILE_TIMEOUT_MS) {
// Setto il flag di TimeOUT che il master dovrà gestire (segnalazione BUG al Server?)
state.fw_timeout_file = true;
}
}
// *********************************************************
// Per la coda/istanze allocate valide SLAVE
// *********************************************************
for (byte queueId = 0; queueId<MAX_NODE_CONNECT; queueId++) {
if (state.remote_node[queueId].node_id <= CANARD_NODE_ID_MAX) {
// Solo se nodo OnLine (Automatic OnLine su HeartBeat RX)
if(IsNodeOnline(state.remote_node[queueId].node_flag)) {
// Controllo TimeOUT Comando diretto su modulo remoto
// Mancata risposta, nodo in Errore o Full o CanardHeapError ecc...
if(IsNodePendingCmd(state.remote_node[queueId].node_flag)) {
if((checkTimeout - state.remote_node[queueId].command_timeout) > NODE_COMMAND_TIMEOUT_MS) {
// Setto il flag di TimeOUT che il master dovrà gestire (segnalazione BUG al Server?)
SetNodeTimeOutCmd(state.remote_node[queueId].node_flag);
}
}
// Controllo TimeOut Comando getData su modulo remoto
// Mancata risposta, nodo in Errore o Full o CanardHeapError ecc...
if(IsNodePendingData(state.remote_node[queueId].node_flag)) {
if((checkTimeout - state.remote_node[queueId].service_timeout) > NODE_GETDATA_TIMEOUT_MS) {
// Setto il flag di TimeOUT che il master dovrà gestire (segnalazione BUG al Server?)
SetNodeTimeOutData(state.remote_node[queueId].node_flag);
}
}
// Controllo TimeOut Comando file su modulo remoto
// Mancata risposta, nodo in Errore o Full o CanardHeapError ecc...
if(IsNodePendingFile(state.remote_node[queueId].node_flag)) {
if((checkTimeout - state.remote_node[queueId].service_timeout) > NODE_GETFILE_TIMEOUT_MS) {
// Setto il flag di TimeOUT che il master dovrà gestire (segnalazione BUG al Server?)
SetNodeTimeOutFile(state.remote_node[queueId].node_flag);
}
}
// Check eventuale Nodo OFFLINE (Ultimo comando sempre perchè posso)
// Effettuare eventuali operazioni di SET,RESET Cmd in sicurezza
if ((checkTimeout - state.remote_node[queueId].heartbeat_timeout) > NODE_OFFLINE_TIMEOUT_MS) {
SetNodeOffline(state.remote_node[queueId].node_flag);
Serial.print(F("Nodo OFFLINE !!! Alert -> : "));
Serial.println(state.remote_node[queueId].node_id);
// Elimina gli eventuali stati pending e TimeOut
// Eventuali altre operazioni quà su Reset Comandi
ResetNodePendingCmd(state.remote_node[queueId].node_flag);
ResetNodePendingData(state.remote_node[queueId].node_flag);
ResetNodePendingFile(state.remote_node[queueId].node_flag);
ResetNodeTimeOutCmd(state.remote_node[queueId].node_flag);
ResetNodeTimeOutData(state.remote_node[queueId].node_flag);
ResetNodeTimeOutFile(state.remote_node[queueId].node_flag);
// Attività x Reset e/o riavvio Nodo dopo OnLine -> Offline
// Solo TEST Locale TODO: da eliminare
bIsResetFaultCmd = true;
}
}
}
}
}
// **************************************************************************
// CANARD UAVCAN
// Scheduler temporizzato dei messaggi / comandi da inviare alla rete UAVCAN
// **************************************************************************
// LOOP HANDLER >> FAST PRIORITY << 333 mSec
if (monotonic_time >= next_333_ms_iter_at)
{
next_333_ms_iter_at += fast_loop_period;
// Download file in corso (read firmware)
if(state.fw_timeout_file) {
state.fw_timeout_file = false;
state.fw_pending_file = false;
Serial.println(F("Time OUT File... reset state"));
}
if(state.fw_update) {
if(!state.fw_pending_file) {
state.fw_pending_file = true;
state.fw_deadline_file = millis();
// Only TEST For Send Request File
// Only TEST for Enter in RX_RESPONSE_READ_FILE (First Attempt) !!!
// BreakPoint in RX (Ok only with LibCanard NOT With Yakut)
handleFileRead_1_1(&state, monotonic_time);
}
}
// Test Led Running
ledShow = !ledShow;
if (ledShow)
digitalWrite(LED_BUILTIN, HIGH);
else
digitalWrite(LED_BUILTIN, LOW);
}
// LOOP HANDLER >> 1 SECONDO <<
if ((monotonic_time >= next_01_sec_iter_at)&&(!state.fw_update)) {
#ifdef PUBLISH_HEARTBEAT
Serial.println(F("Publish MASTER Heartbeat -->> [1 sec]"));
#endif
next_01_sec_iter_at += MEGA;
handle1HzLoop(&state, monotonic_time);
}
// LOOP HANDLER >> 20 SECONDI PUBLISH SERVIZI <<
if ((monotonic_time >= next_20_sec_iter_at)&&(!state.fw_update)) {
next_20_sec_iter_at += MEGA * 20;
#ifdef PUBLISH_PORTLIST
Serial.println(F("Publish local PORT List -- [20 sec]"));
#endif
handle01HzLoop(&state, monotonic_time);
}
#ifdef TEST_COMMAND
// ********************** TEST COMANDO TX-> RX<- *************************
// LOOP HANDLER >> 0..15 SECONDI x TEST COMANDI <<
if ((monotonic_time >= test_cmd_cs_iter_at)&&(!state.fw_update)) {
// TimeOUT variabile in 15 secondi
test_cmd_cs_iter_at += MEGA * ((float)(rand() % 60)/4.0);
// Invio un comando di test in prova al nodo 125
// Possibile accesso da NodeId o direttamente dall'indice in coda conosciuto al master
// Abilito disabilito pubblicazione dei dati ogni 3 secondi...
byte queueId = getQueueNodeFromId(&state, 125);
// Il comando viene inviato solamente se il nodo è ONLine
if(IsNodeOnline(state.remote_node[queueId].node_flag)) {
// Il comando viene inviato solamente senza altri Pending di Comandi
// La verifica andrebbe fatta per singolo servizio, non necessario un blocco di tutto
if(!IsNodePendingCmd(state.remote_node[queueId].node_flag)) {
// Imposta il pending del comando per verifica sequenza TX-RX e il TimeOut
// Imposta la risposta del comadno A UNDEFINED (verrà settato al valore corretto in risposta)
SetNodePendingCmd(state.remote_node[queueId].node_flag);
state.remote_node[queueId].command_timeout = millis();
state.remote_node[queueId].command_response = GENERIC_BVAL_UNDEFINED;
// Il comando inverte il servizio di pubblicazione continua dei dati remoti
// Semplice TEST di esempio (queueId = IDX di coda, diventerà l'istanza relativa)
bEnabService = !bEnabService;
if (bEnabService) {
serviceSendCommand(&state, monotonic_time, queueId,
CMD_DISABLE_PUBLISH_DATA, NULL, 0);
} else {
serviceSendCommand(&state, monotonic_time, queueId,
CMD_ENABLE_PUBLISH_DATA, NULL, 0);
}
}
}
// La verifica verrà fatta con il Flag Pending resettato e la risposta viene
// popolata nel'apposito registro di state service_module del il servizio relativo
// Il set data avviene in processReciveTranser alle sezioni CanardTransferKindResponse
// Eventuale Flag TimeOut indica un'avvenuta mancata risposta al comando
// Il master una volta inviato il comando deve attendere ResetPending o TimeOutCommand
}
// Test rapido con nodo[0]... SOLO x OUT TEST DI VERIFICA TX/RX SEQUENZA
// TODO: Eliminare, solo per verifica sequenza... Gestire da Master...
if (IsNodeTimeOutCmd(state.remote_node[0].node_flag)) {
// TimeOUT di un comando in attesa... gestisco il da farsi
Serial.print(F("Timeout risposta su invio comando al nodo remoto: "));
Serial.print(state.remote_node[0].node_id);
Serial.println(F(", Warning [restore pending command]"));
// Adesso elimino solo gli stati
ResetNodePendingCmd(state.remote_node[0].node_flag);
ResetNodeTimeOutCmd(state.remote_node[0].node_flag);
// Adesso elimino solo gli stati per corretta visualizzazione a Serial.println
bIsPendingCmd = false;
bLastPendingCmd = false;
} else {
bIsPendingCmd = IsNodePendingCmd(state.remote_node[0].node_flag);
// Gestione esempio di fault (Entrata in Offline... non faccio nulla solo reset var locale test)
if(bIsResetFaultCmd) {
bIsPendingCmd = false;
bLastPendingCmd = false;
}
if(bLastPendingCmd != bIsPendingCmd) {
bLastPendingCmd = bIsPendingCmd;
if(bLastPendingCmd) {
Serial.print(F("Inviato comando al nodo remoto: "));
Serial.println(state.remote_node[0].node_id);
} else {
Serial.print(F("Ricevuto conferma di comando dal nodo remoto: "));
Serial.print(state.remote_node[0].node_id);
Serial.print(F(", cod. risposta ->: "));
Serial.println(state.remote_node[0].command_response);
}
}
}
// ***************** FINE TEST COMANDO TX-> RX<- *************************
#endif
#ifdef TEST_DATA
// ********************** TEST GETDATA TX-> RX<- *************************
// LOOP HANDLER >> 0..15 SECONDI x TEST GETDATA <<
if ((monotonic_time >= test_cmd_vs_iter_at)&&(!state.fw_update)) {
// TimeOUT variabile in 15 secondi
test_cmd_vs_iter_at += MEGA * ((float)(rand() % 60)/4.0);
// Invio un comando di test in prova al nodo 125
// Possibile accesso da NodeId o direttamente dall'indice in coda conosciuto al master
// Abilito disabilito pubblicazione dei dati ogni 5 secondi...
byte queueId = getQueueNodeFromId(&state, 125);
// Il comando viene inviato solamente se il nodo è ONLine
if(IsNodeOnline(state.remote_node[queueId].node_flag)) {
// Il comando viene inviato solamente senza altri Pending di Comandi
// La verifica andrebbe fatta per singolo servizio, non necessario un blocco di tutto
if(!IsNodePendingData(state.remote_node[queueId].node_flag)) {
// Imposta il pending del comando per verifica sequenza TX-RX e il TimeOut
// La risposta al comando è già nel blocco dati, non necessaria ulteriore variabile
SetNodePendingData(state.remote_node[queueId].node_flag);
state.remote_node[queueId].service_timeout = millis();
// Il comando richiede il dato istantaneo ad un nodo remoto
// Semplice TEST di esempio con i parametri in richiesta
rmap_service_setmode_1_0 parametri;
parametri.comando = rmap_service_setmode_1_0_get_istant;
// parametri.run_for_second = 900; ( inutile in get_istant )
serviceSendRequestData(&state, monotonic_time, queueId,
rmap_service_setmode_1_0_get_istant, 10);
}
}
// La verifica verrà fatta con il Flag Pending resettato e la risposta viene
// popolata nel'apposito registro di state service_module del il servizio relativo
// Il set data avviene in processReciveTranser alle sezioni CanardTransferKindResponse
// Eventuale Flag TimeOut indica un'avvenuta mancata risposta al comando
// Il master una volta inviato il comando deve attendere ResetPending o TimeOutCommand
}
// Test rapido con nodo[0]... SOLO x OUT TEST DI VERIFICA TX/RX SEQUENZA
// TODO: Eliminare, solo per verifica sequenza... Gestire da Master...
if (IsNodeTimeOutData(state.remote_node[0].node_flag)) {
// TimeOUT di un comando in attesa... gestisco il da farsi
Serial.print(F("Timeout risposta su richiesta dati al nodo remoto: "));
Serial.print(state.remote_node[0].node_id);
Serial.println(F(", Warning [restore pending command]"));
// Adesso elimino solo gli stati per corretta visualizzazione a Serial.println
ResetNodePendingData(state.remote_node[0].node_flag);
ResetNodeTimeOutData(state.remote_node[0].node_flag);
bIsPendingData = false;
bLastPendingData = false;
} else {
bIsPendingData = IsNodePendingData(state.remote_node[0].node_flag);
// Gestione esempio di fault (Entrata in Offline... non faccio nulla solo reset var locale test)
if(bIsResetFaultCmd) {
bIsPendingData = false;
bLastPendingData = false;
}
if(bLastPendingData != bIsPendingData) {
bLastPendingData = bIsPendingData;
if(bLastPendingData) {
Serial.print(F("Inviato richiesta dati al nodo remoto: "));
Serial.println(state.remote_node[0].node_id);
} else {
// Interprete del messaggio in casting dal puntatore dinamico
// Nell'esempio Il modulo e TH, naturalmente bisogna gestire il tipo
// in funzione di state.remote_node[x].node_type
rmap_service_module_TH_Response_1_0* retData =
(rmap_service_module_TH_Response_1_0*) state.remote_node[0].service_module;
// Stampo la risposta corretta
Serial.print(F("Ricevuto risposta di richiesta dati dal nodo remoto: "));
Serial.print(state.remote_node[0].node_id);
Serial.print(F(", cod. risposta ->: "));
Serial.println(retData->stato);
// Test data Received e stampa valori con accesso al puntatore in casting per il modulo
Serial.println(F("Value L1, TP, UH: "));
Serial.print(retData->dataandmetadata.metadata.level.L1.value);
Serial.print(F(", "));
Serial.print(retData->dataandmetadata.temperature.val.value);
Serial.print(F(", "));
Serial.println(retData->dataandmetadata.humidity.val.value);
}
}
}
// ***************** FINE TEST GETDATA TX-> RX<- *************************
#endif
// RESET Gestione Fault di NODO TODO: Eliminare solo per verifica test
bIsResetFaultCmd = false;
// ***************************************************************************
// Gestione Coda messaggi in trasmissione (ciclo di svuotamento messaggi)
// ***************************************************************************
// Transmit pending frames from the prioritized TX queues managed by libcanard.
for (uint8_t ifidx = 0; ifidx < CAN_REDUNDANCY_FACTOR; ifidx++)
{
CanardTxQueue* const que = &state.canard_tx_queues[ifidx];
const CanardTxQueueItem* tqi = canardTxPeek(que); // Find the highest-priority frame.
while (tqi != NULL)
{
delay(20);
// TODO: Remove test
#ifdef LOG_TX_RX_ATTEMPT
bTxAttempt++;
if ((millis() - lastMillis) > 333) {
Serial.print("TX Attempt -> ");
Serial.println(bTxAttempt);
lastMillis = millis();
}
#endif
// Attempt transmission only if the frame is not yet timed out while waiting in the TX queue.
// Otherwise just drop it and move on to the next one.
if ((tqi->tx_deadline_usec == 0) || (tqi->tx_deadline_usec > monotonic_time))
{
// Non-blocking write attempt.
if (bxCANPush(0,
monotonic_time,
tqi->tx_deadline_usec,
tqi->frame.extended_can_id,
tqi->frame.payload_size,
tqi->frame.payload)) {
// Push CAN data
state.canard.memory_free(&state.canard, canardTxPop(que, tqi));
tqi = canardTxPeek(que);
} else {
// Empty Queue
break;
}
}
else
{
// Free TO
state.canard.memory_free(&state.canard, canardTxPop(que, tqi));
tqi = canardTxPeek(que);
}
}
}
// TODO: Interrupt RX...
// ***************************************************************************
// Gestione Coda messaggi in ricezione (ciclo di caricamento messaggi)
// ***************************************************************************
// for (uint8_t ifidx = 0; ifidx < CAN_MAX_IFACE; ifidx++)
// TEST Temporaneo... TODO
while(1)
{
CanardFrame frame;
uint8_t buf[CANARD_MTU_MAX] = {0};
const byte ifidx = 0;
frame.extended_can_id = 0;
frame.payload_size = sizeof(buf);
// The read operation has timed out with no frames, nothing to do here.
if (bxCANPop(ifidx, &frame.extended_can_id, &frame.payload_size, buf)) {
// Get payload from Buffer
frame.payload = buf;
// TODO: Remove test
bRxAttempt++;
#ifdef LOG_TX_RX_ATTEMPT
bRxAttempt++;
if ((millis() - lastMillis) > 333) {
Serial.print("RX Attempt <- ");
Serial.println(bRxAttempt);
lastMillis = millis();
}
#endif
#ifdef LOG_RX_PACKET
Serial.print(F("Data -> PL:"));
Serial.print(frame.payload_size);
Serial.print(F(",Val: "));
int i;
for(i=0; i<frame.payload_size; i++) {
Serial.print("0x");
Serial.print(buf[i] < 16 ? "0" : "");
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println("");
#endif
// The SocketCAN adapter uses the wall clock for timestamping, but we need monotonic.
// Wall clock can only be used for time synchronization.
const CanardMicrosecond timestamp_usec = getMonotonicMicroseconds();
CanardRxTransfer transfer;
const int8_t canard_result = canardRxAccept(&state.canard, timestamp_usec, &frame, ifidx, &transfer, NULL);
if (canard_result > 0)
{
processReceivedTransfer(&state, &transfer);
state.canard.memory_free(&state.canard, (void*) transfer.payload);
}
else if ((canard_result == 0) || (canard_result == -CANARD_ERROR_OUT_OF_MEMORY))
{
// TODO: Remove test
#ifdef LOG_TX_RX_ATTEMPT
if ((millis() - lastMillis) > 333) {
Serial.print("Rx Nothing ToDo...");
lastMillis = millis();
}
#endif
(void) 0; // The frame did not complete a transfer so there is nothing to do.
// OOM should never occur if the heap is sized correctly. You can track OOM errors via heap API.
}
else
{
assert(false); // No other error can possibly occur at runtime.
}
}
else
break;
}
} while (!g_restart_required);
// Reboot
NVIC_SystemReset();
}