Hello Skyyuzhang,
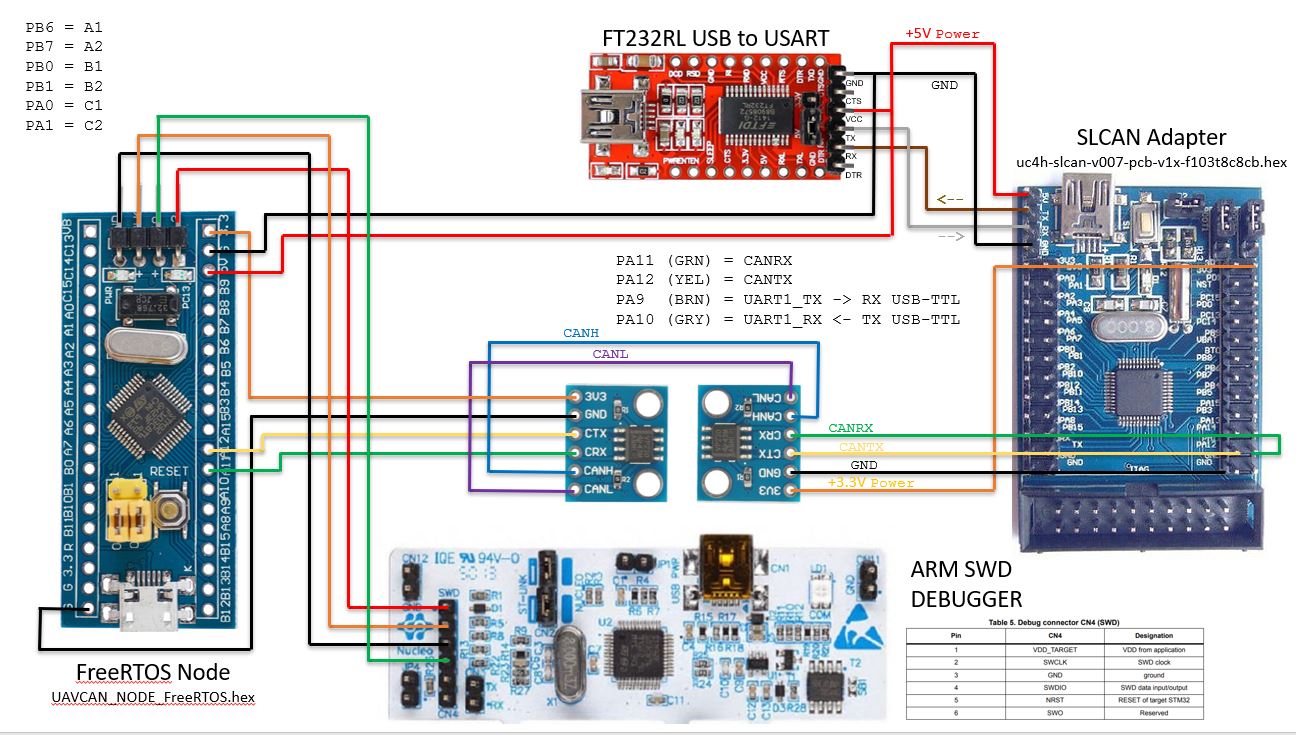
Thanks again for sharing your working project on GitHub. I built it up and tested on inexpensive STM32F103s with known good SN65HVD230 adapters and had immediate success. Compiled with gcc 7.3.0 on Windows. I’ve documented it here RC Groups - View Single Post - DIY UAVCAN: STM32 (F1, F3) step-by-step
Thanks so much,
George