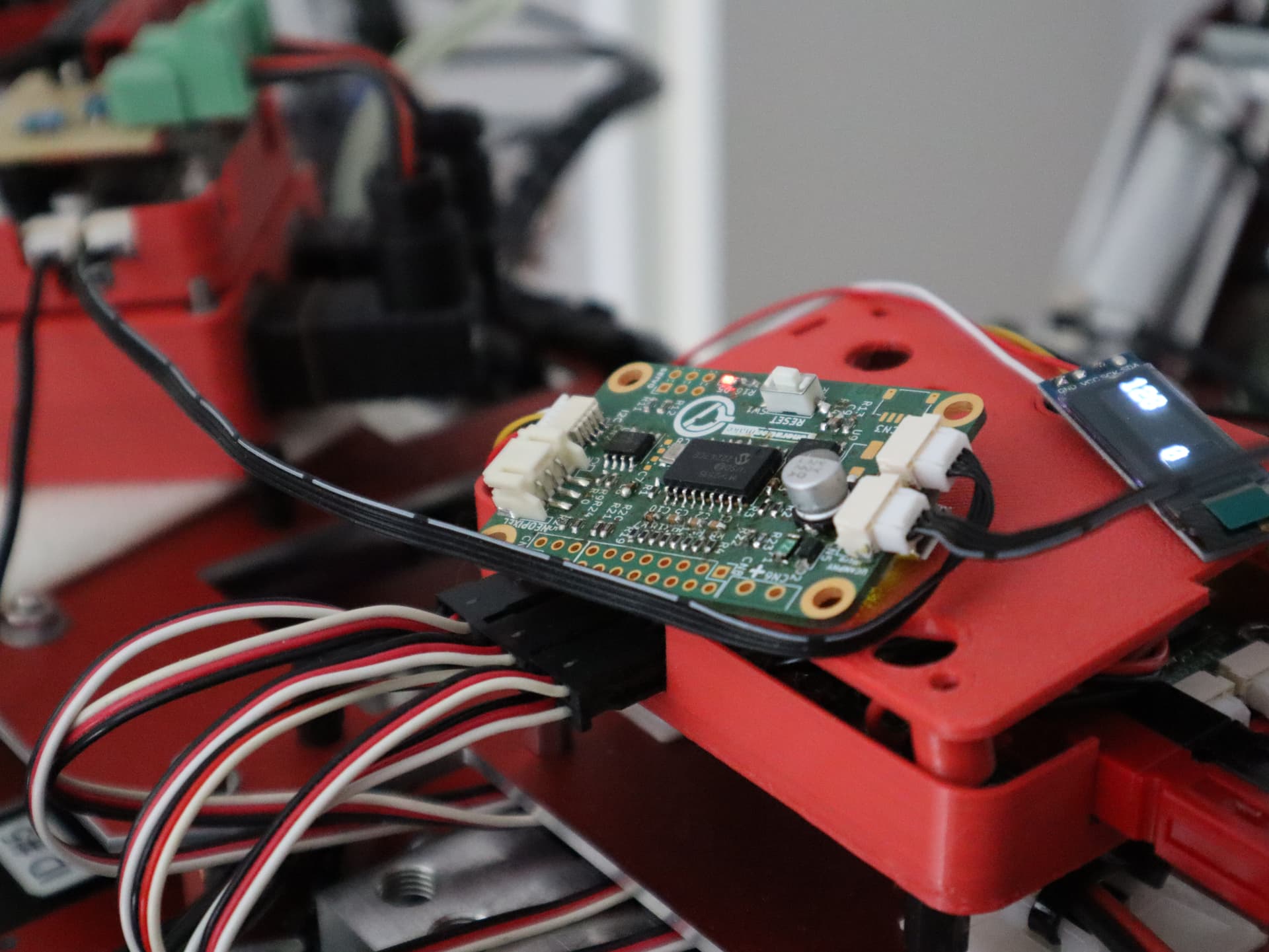
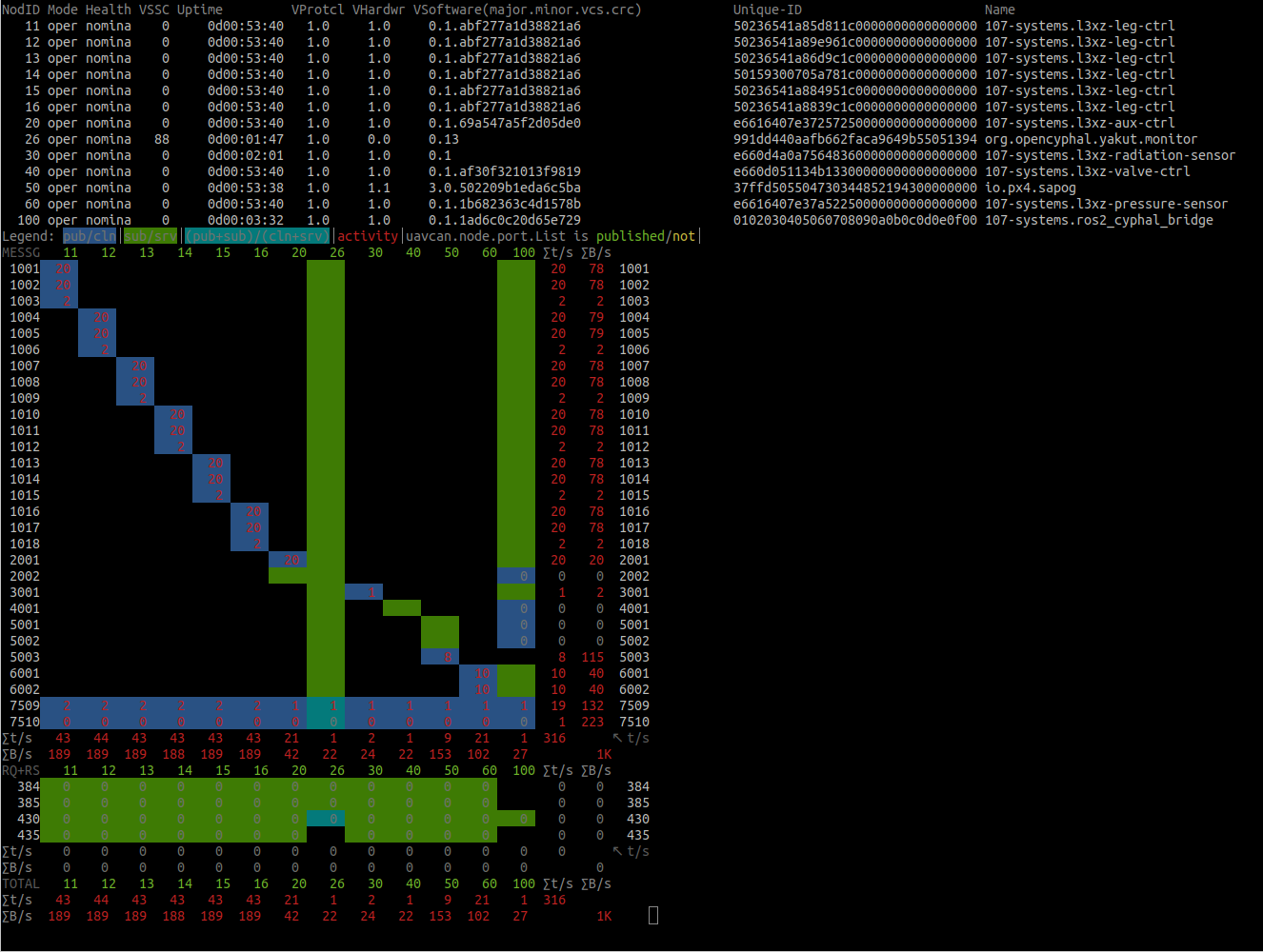
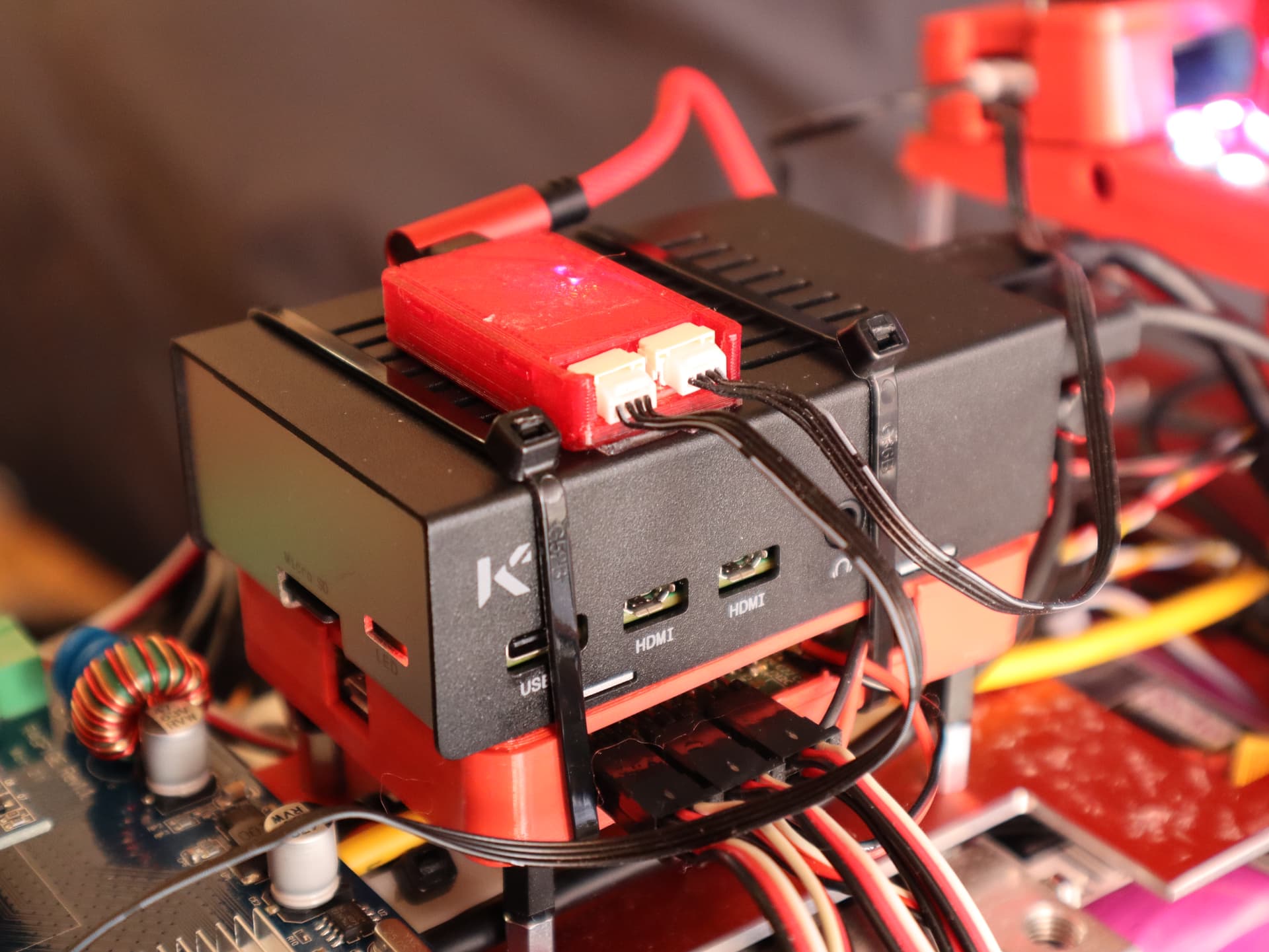
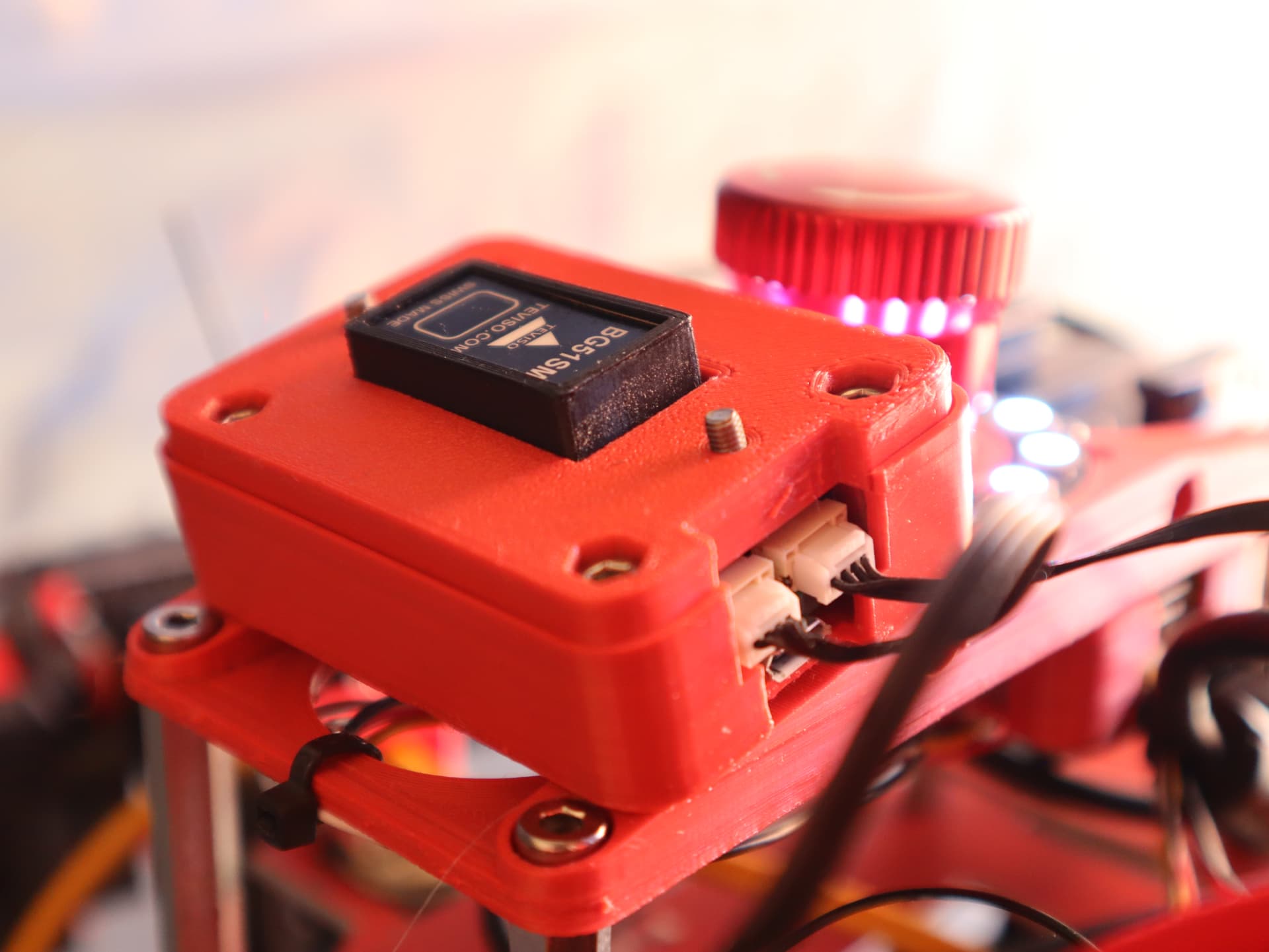
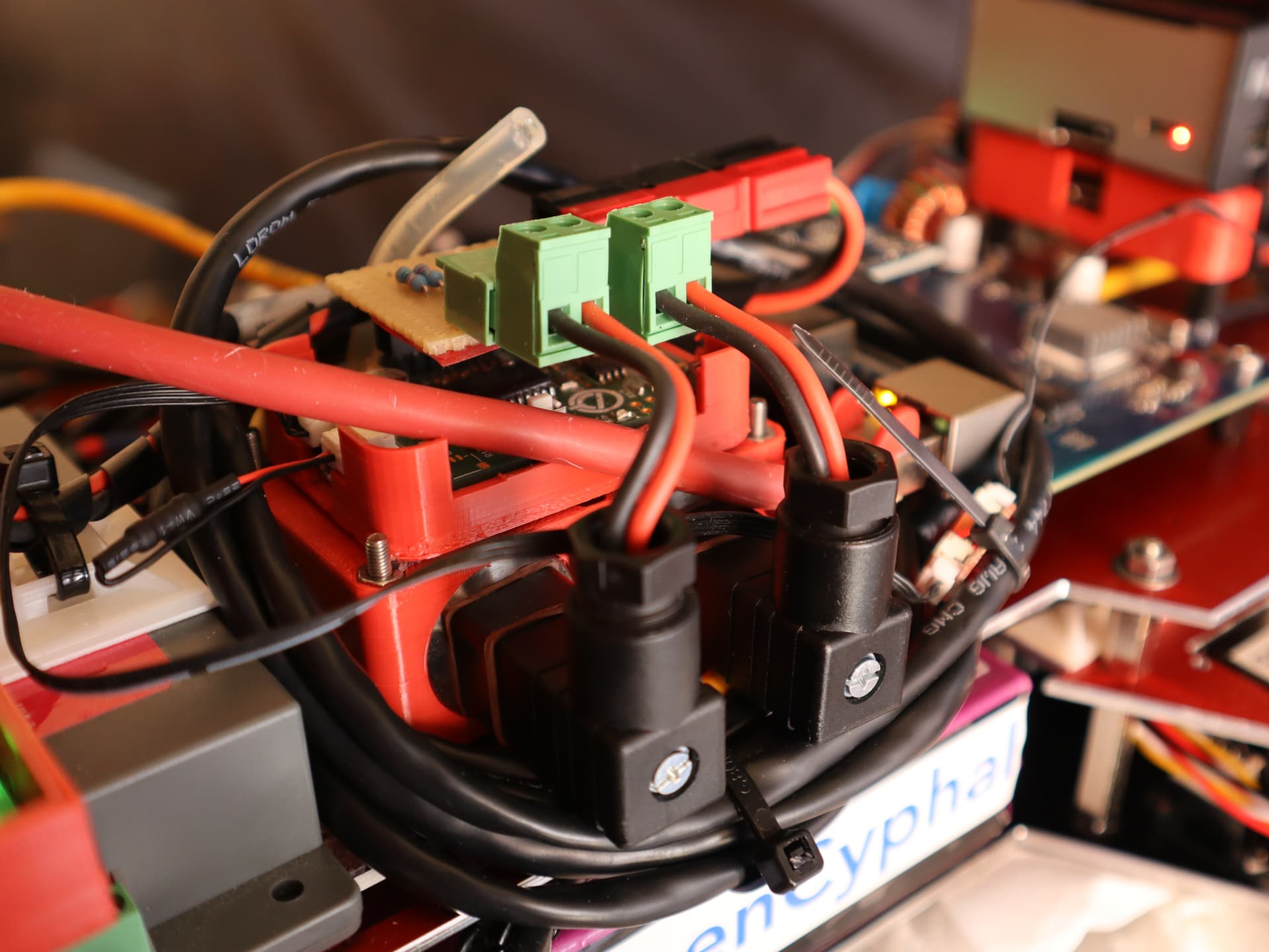
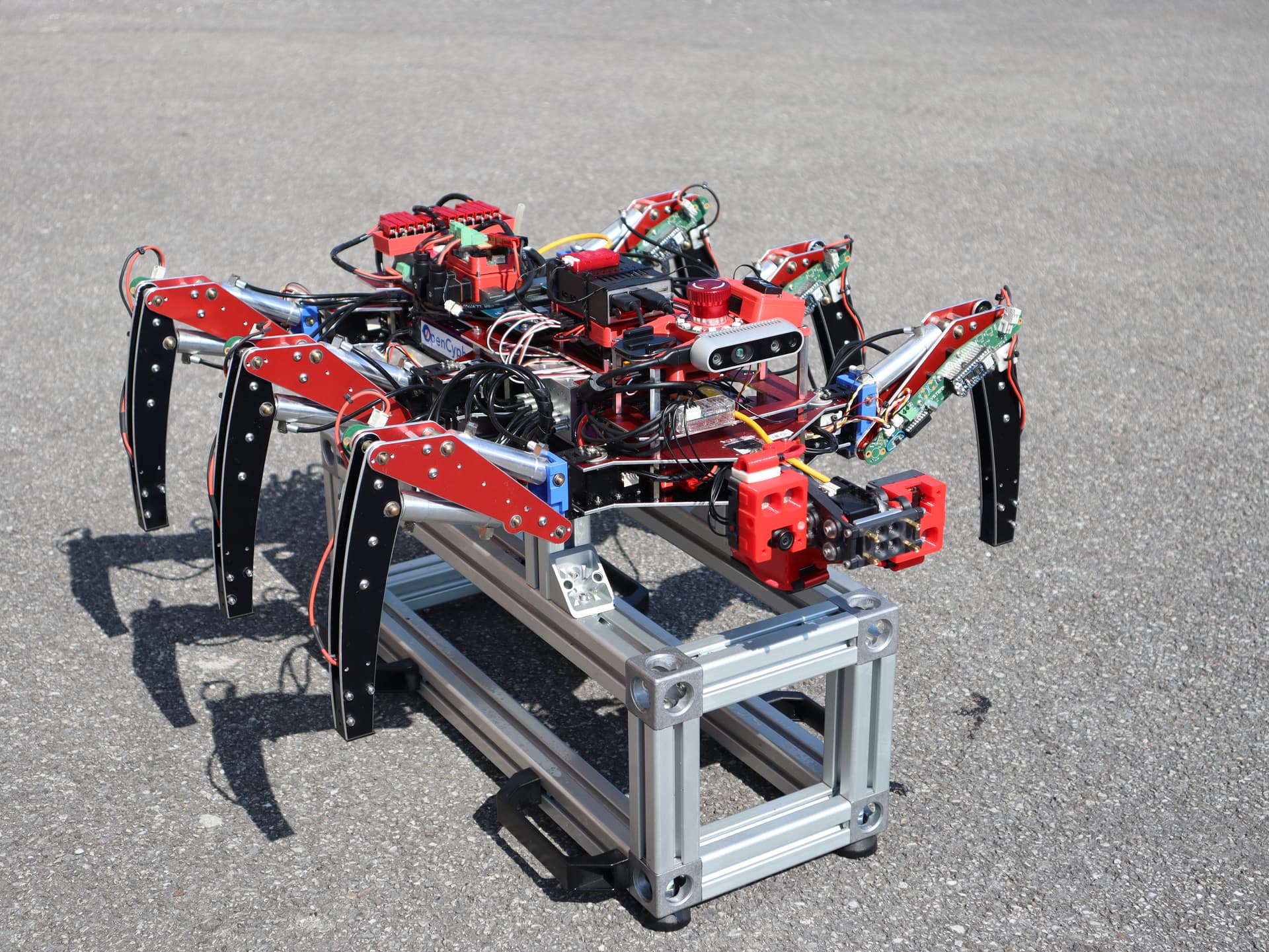
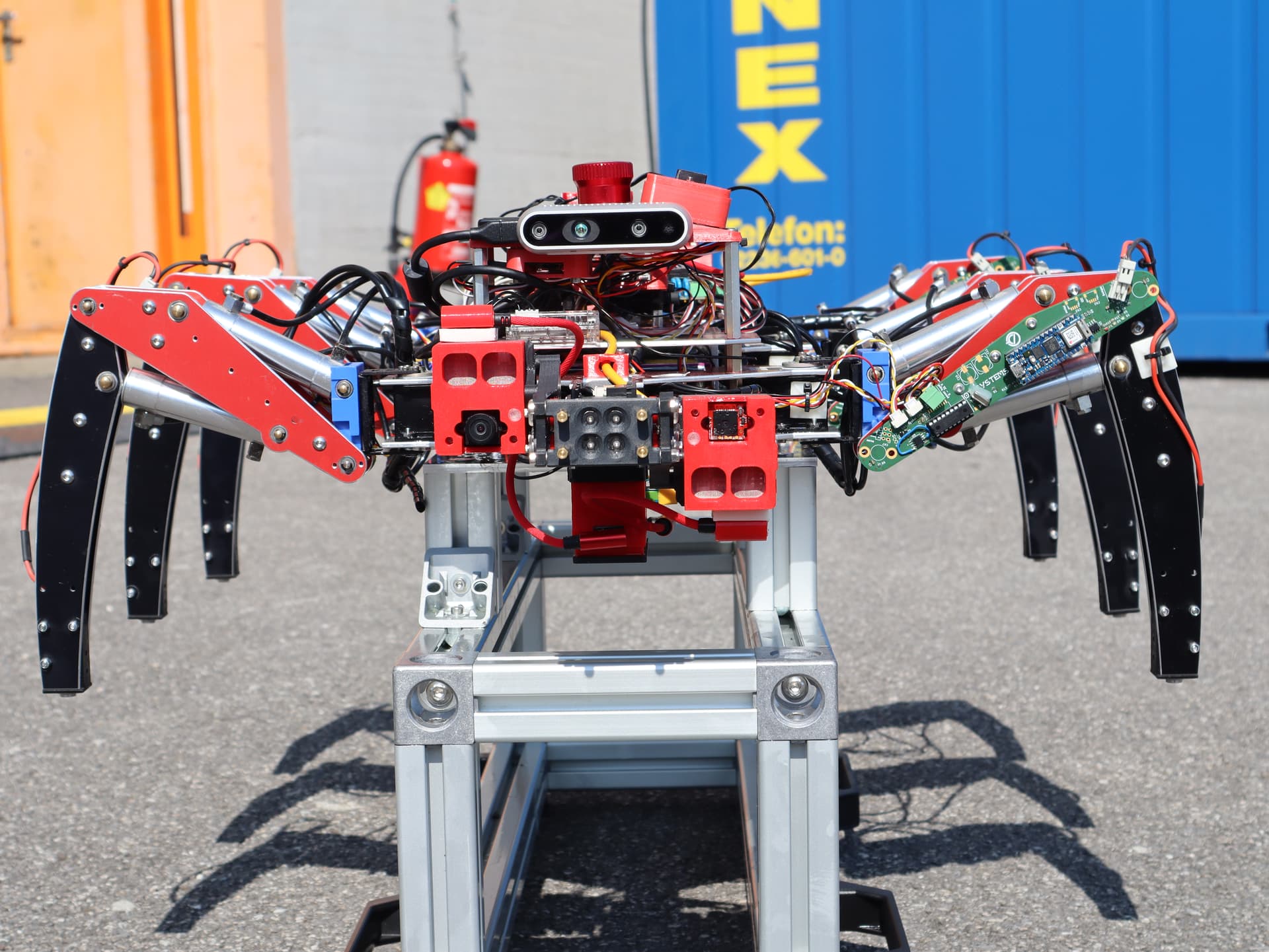
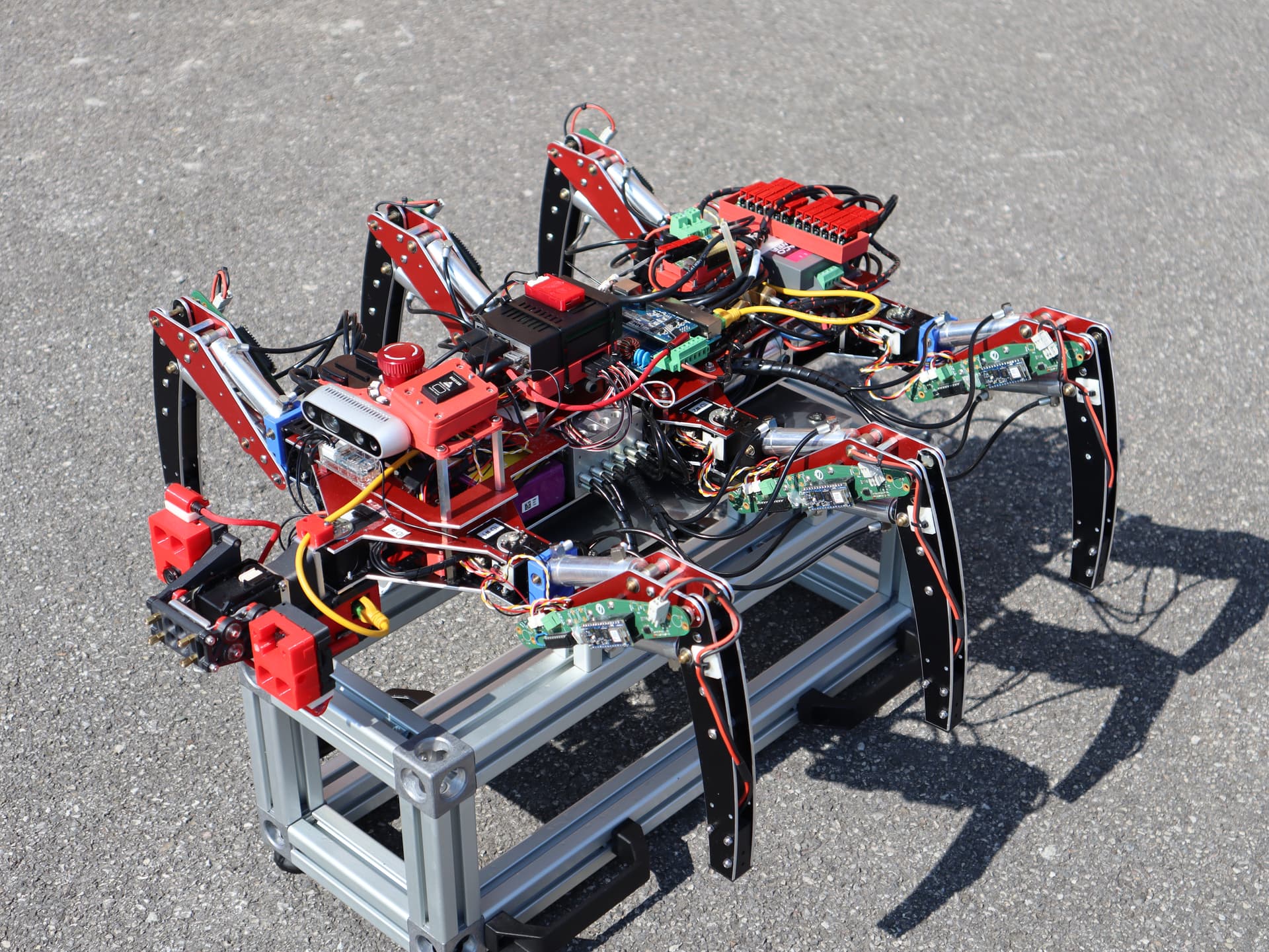
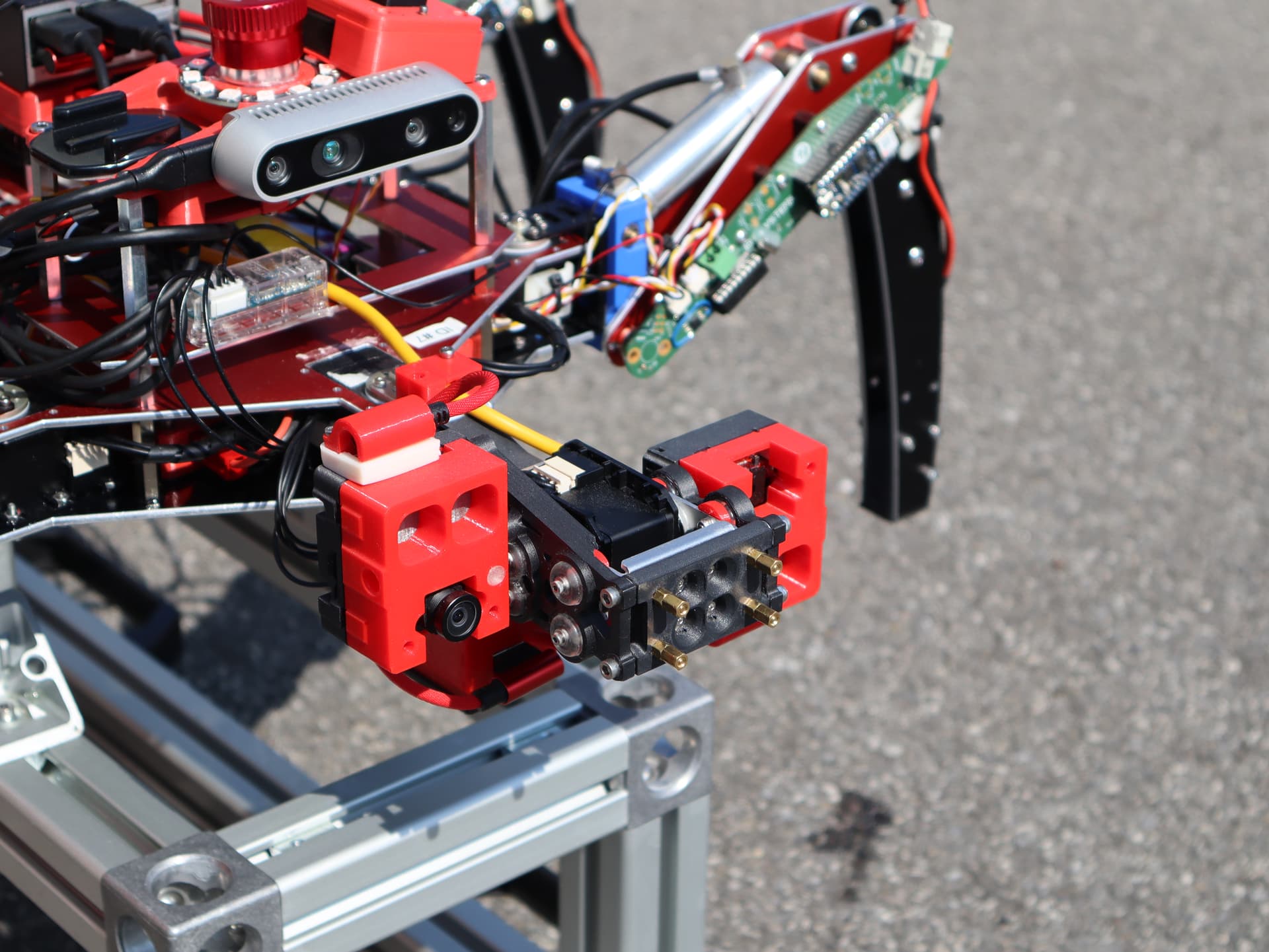
This increases the number of 107-Arduino-Cyphal based Cyphal-networked devices running flawlessly on a single 250 kBits/s CAN network to 11 plus one more which is a Zubax Orel 20 = 12 Cyphal enabled devices on a single CAN bus.
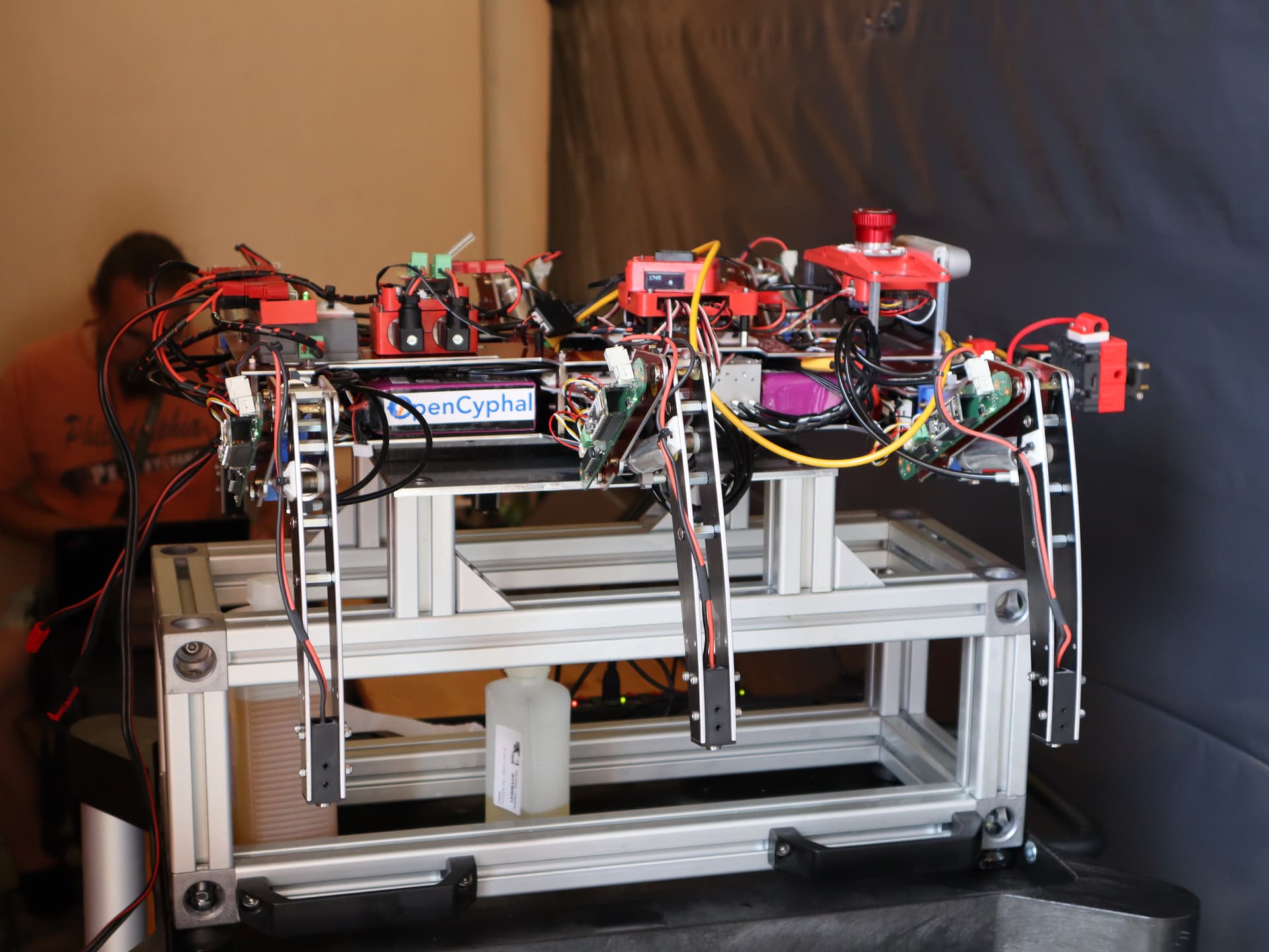
ENRICH 2023 is upon us and I’d like to share a couple of pictures from Day #1.
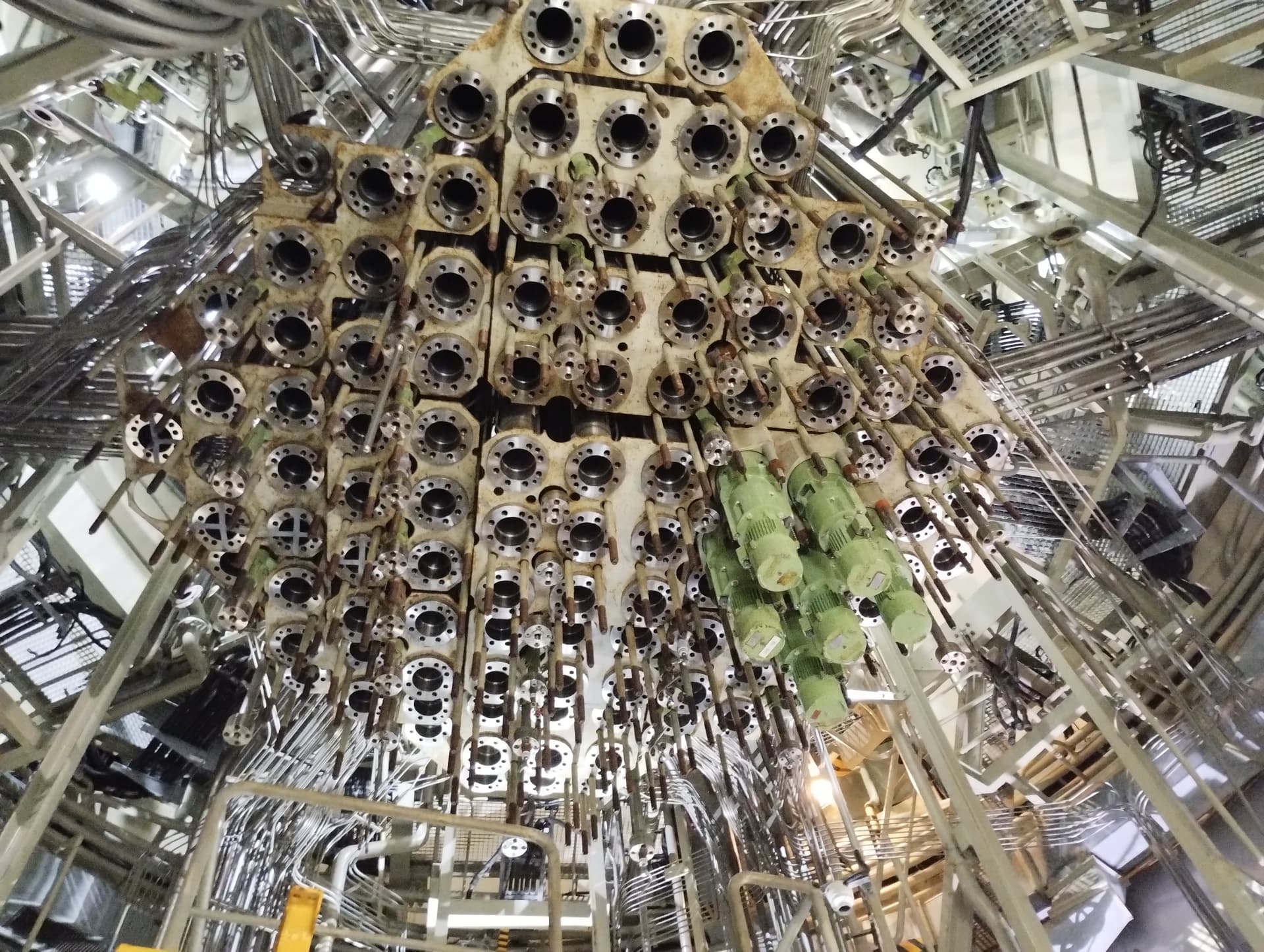
Location is the never-turned-on nuclear power plant Zwentendorf in Austria .
The event’s purpose is to provide a real-world testing ground for robotic systems in a scenario simulating a radiation incident at a nuclear power plant.
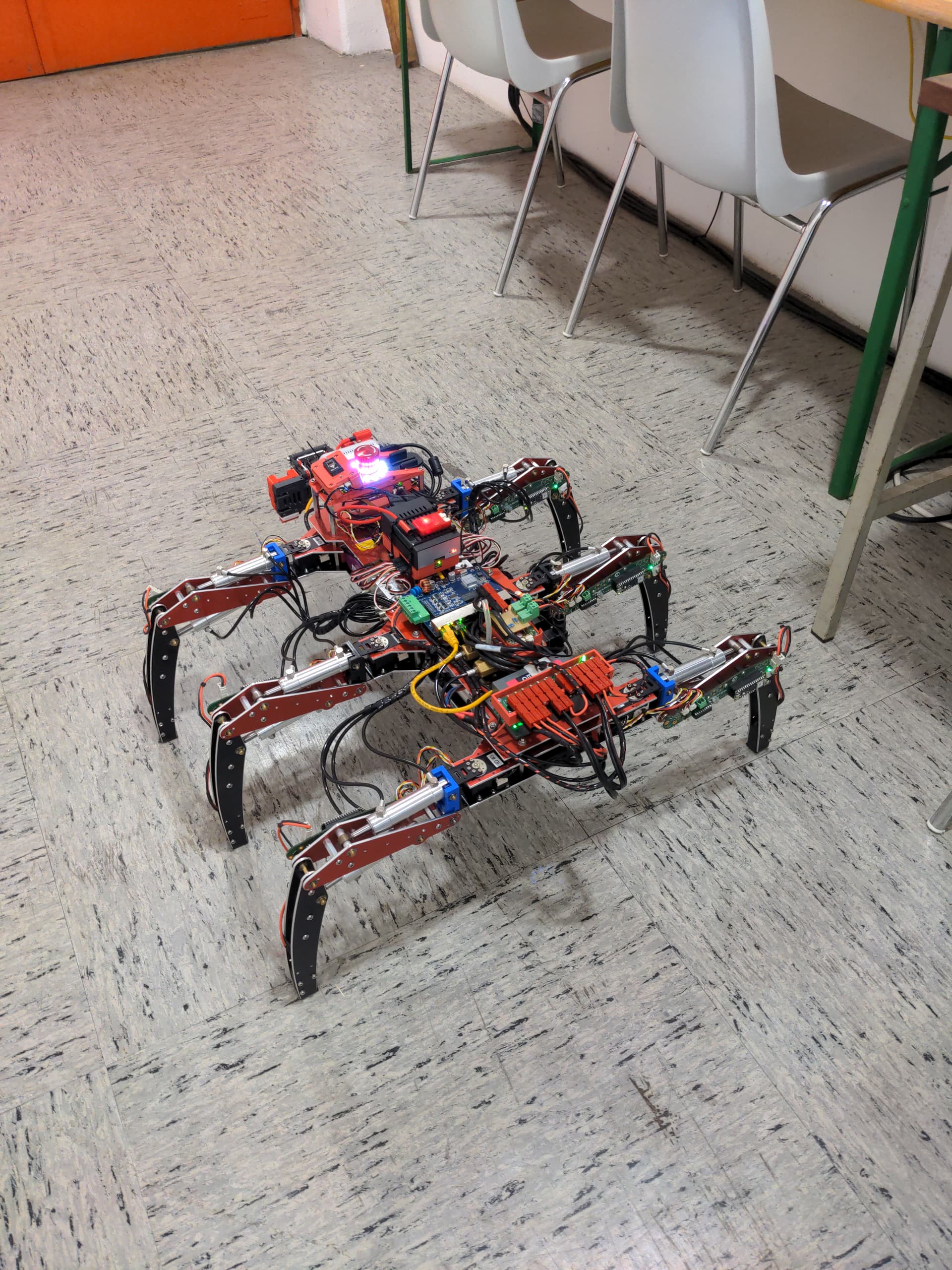
ENRICH 2023Day #2 in Zwentendor, Austria . (Included a guided tour through the internals of the only never-has-been-operational nuclear power plant in the world).
Well there is a lot to learn . I’m happy to report that all of our Cyphal systems (and there are many, see above) worked without a hitch. But the robot turned out to be a bit too nose-heavy and a bit too underpowered. This was less of a problem last year as the walking algorithm did not really bother to see if the legs followed the computed trajectory, but with the latest changes and active trajectory control each leg I had to learn that the hydraulics provide to little volume flow for the kind of smooth motion envisioned by the algorithm. Basically there’s the need for another hydraulic pump while also shedding some weight and distributing the remaining weight more evenly across the system.