Hello. I’m currently working on a javascript only implementation of uavcan protocol and sl-can as a webservice that will allow to monitor the bus from any webbrowser (using websocket).
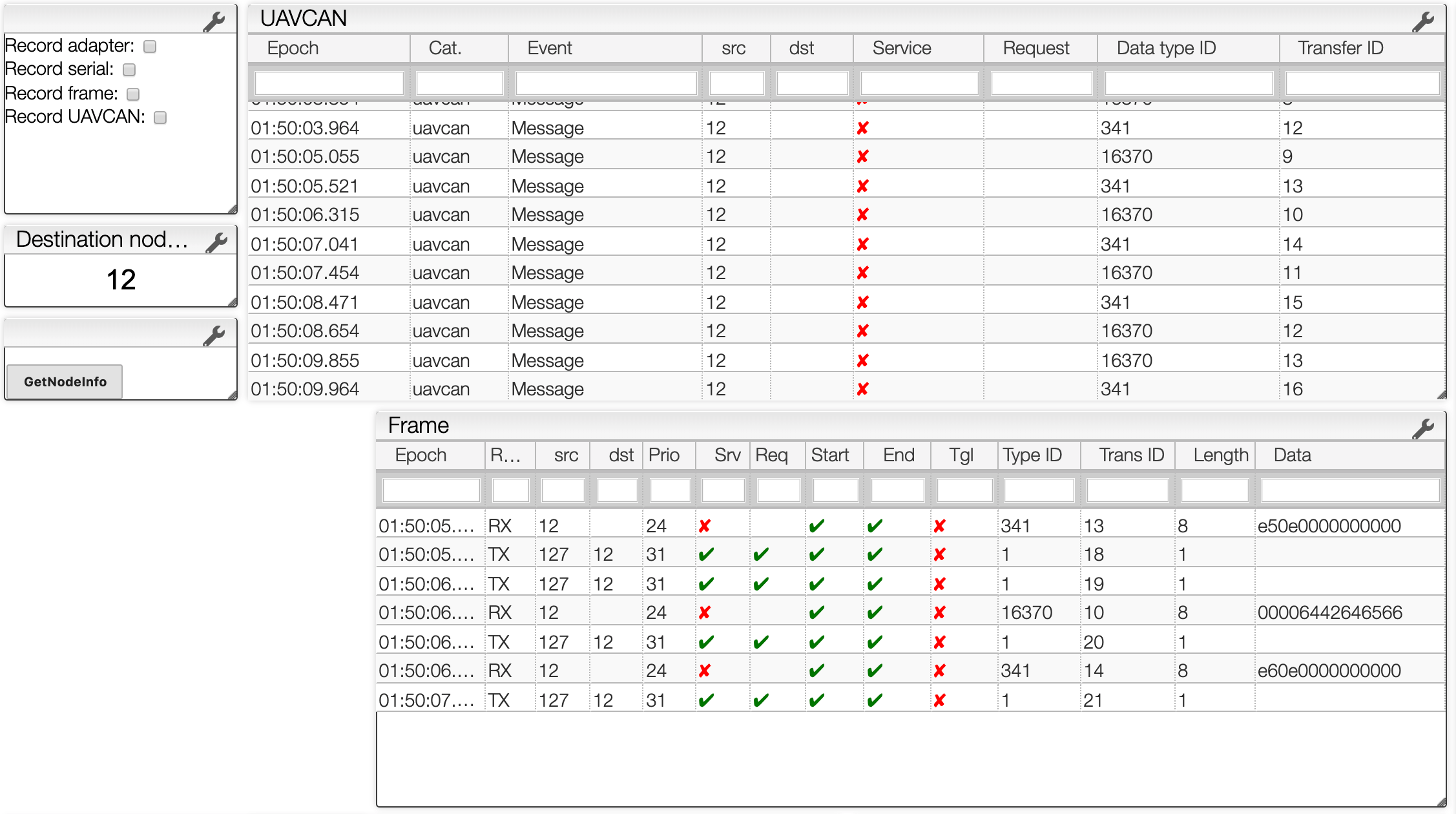
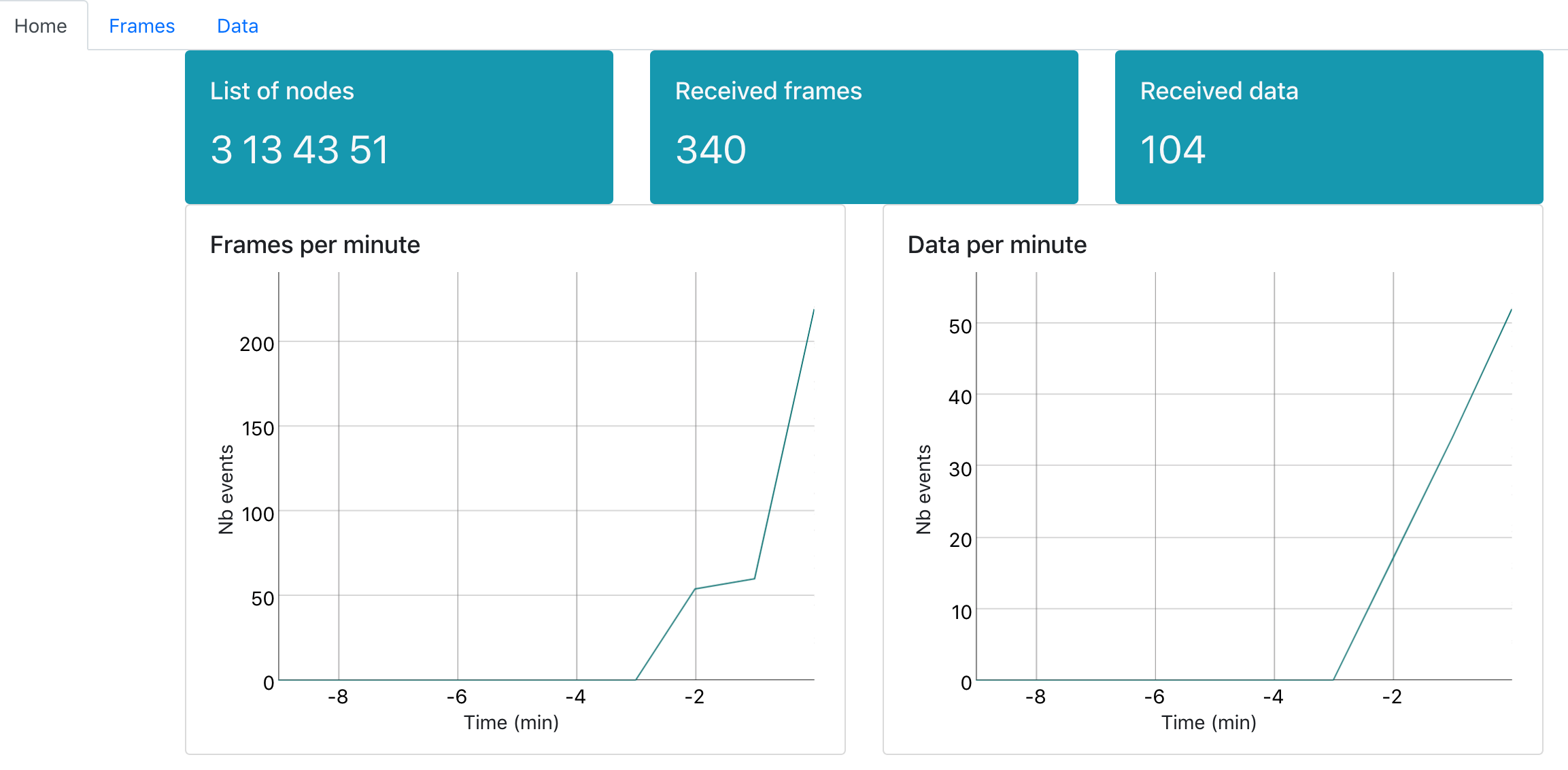
This is still a very early stage but currently we are able to serialize and parse the data and I guess in once month it will look more finished but here is a small screen snapshot of the current state:
This is awesome, thanks @lpatiny. I am wondering if it is possible to join our efforts on Yukon? We are discussing things as we go in this thread, the work is led by @Zarkopafilis: Yukon UI & Rest API