The default filter config I was looking for will end up with the ID field as (0x1FFF << 8), and in the case of the mask, same as line #195 from the PyUAVCAN function you shared, adding 3 bits to the mask aside from the (0x1D55 << 8).
I also found the migration guide below that clarifies why the bits 22 and 21 are being ignored in the mask. This completes the explanation of all the bits particular when dealing solely with messages, as in the simplest case mentioned earlier.
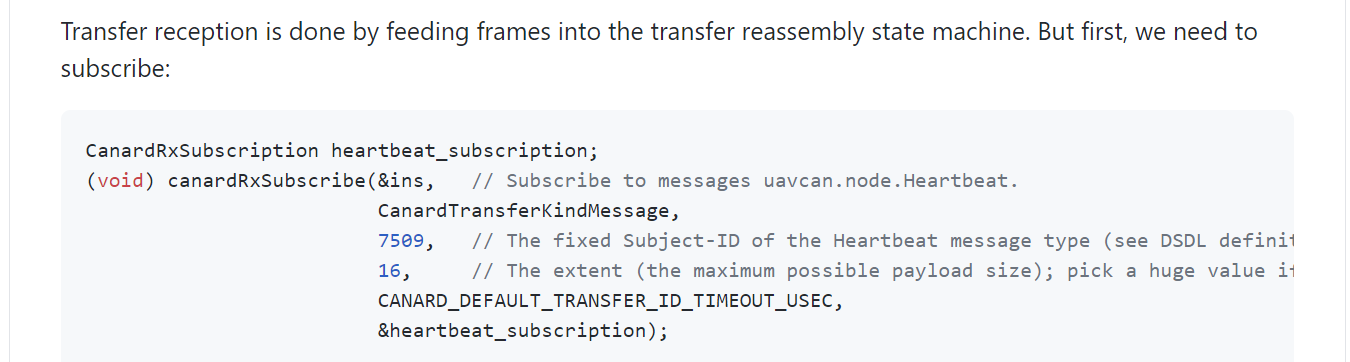
I think this step of configuring the filter is the only one that is skipped from the libcanard example provided in the repo’s readme; and adding this step to the section that demonstrates how to setup reception could be of support for the documentation.